AC电机控制算法
标量控制
标量控制(或V/Hz控制)是一个控制指令电机速度的简单方法,指令电机的稳态模型主要用于获得技术,因此瞬态性能是不可能实现的。系统不具有电流回路。为了控制电机,三相电源只有在振幅和频率上变化。
矢量控制或磁场定向控制
在电动机中的转矩随着定子和转子磁场的功能而变化,并且当两个磁场互相正交时达到峰值。在基于标量的控制中,两个磁场间的角度显著变化。
矢量控制设法在AC电机中再次创造正交关系。为了控制转矩,各自从产生磁通量中生成电流,以实现DC机器的响应性。一个AC指令电机的矢量控制与一个单独的励磁DC电机控制相似。在一个DC电机中,由励磁电流IF所产生的磁场能量Φ F与由电枢电流IA所产生的电枢磁通ΦA正交。这些磁场都经过去耦并且相互间很稳定。因此,当电枢电流受控以控制转矩时,磁场能量仍保持不受影响,并实现了更快的瞬态响应。三相AC电机的磁场定向控制(FOC)包括模仿DC电机的操作。所有受控变量都通过数学变换,被转换到DC而非AC。其目标的独立的控制转矩和磁通。
磁场定向控制(FOC)有两种方法:直接FOC: 转子磁场的方向(Rotor flux angle) 是通过磁通观测器直接计算得到的间接FOC: 转子磁场的方向(Rotor flux angle) 是通过对转子速度和滑差(slip)的估算或测量而间接获得的。矢量控制要求了解转子磁通的位置,并可以运用终端电流和电压(采用AC感应电机的动态模型)的知识,通过高级算法来计算。然而从实现的角度看,对于计算资源的需求是至关重要的。
可以采用不同的方式来实现矢量控制算法。前馈技术、模型估算和自适应控制技术都可用于增强响应和稳定性。
AC电机的矢量控制:
矢量控制算法的核心是两个重要的转换: Clark转换,Park转换和它们的逆运算。采用Clark和Park转换,带来可以控制到转子区域的转子电流。这种做充许一个转子控制系统决定应供应到转子的电压,以使动态变化负载下的转矩最大化
Clark转换:Clark数学转换将一个三相系统修改成两个坐标系统:
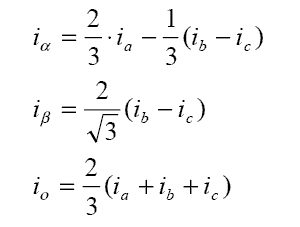
其中Ia和Ib正交基准面的组成部分,Io是不重要的homoplanar部分

Park转换:Park数学转换将双向静态系统转换成转动系统矢量
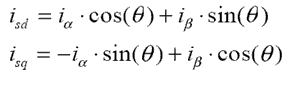
两相α, β帧表示通过Clarke转换进行计算,然后输入到矢量转动模块,它在这里转动角θ,以符合附着于转子能量的d, q帧。根据上述公式,实现了角度θ的转换。
AC电机的磁场定向矢量控制的基本结构
Clarke变换采用三相电流IA, IB 以及 IC,来计算两相正交定子轴的电流I?和 I?。这两个在固定座标定子相中的电流被变换成Isd 和Isq,成为Park变换d, q中的元素。其通过电机通量模型来计算的电流Isd, Isq 以及瞬时流量角θ被用来计算交流感应电机的电动扭矩。这些导出值与参考值相互比较,并由PI控制器更新。


基于矢量的电机控制的一个固有优势是,可以采用同一原理,选择适合的数学模型去分别控制各种类型的AC, PM-AC 或者 BLDC电机。
BLDC电机的矢量控制
BLDC电机是磁场定向矢量控制的主要选择。采用了FOC的无刷电机可以获得更高的效率,最高效率可以达到95%,并且对电机在高速时也十分有效率。
未完待续!
本文来源:全易古侠2016的博客
相关文章 电机控制之常用算法概述(1)