首先向大家提出第一个参数,测量范围。它是传感器可以支持的输出加速度范围,通常用±g表示。这就是加速度传感器可以测量并准确输出的最大加速。例如,一个测量范围是±3g加速度计的输出一直到加速度达到±3g时是线性的。
灵敏度表示传感器输出随加速度(输入)变化的比例,它定义理想情况下加速度和传感器输出的直线关系,如下图中的灰线。对于模拟输出的加速度传感器,灵敏度是在指定的供电下给出的,通常用mV/g表示。数字输出的传感器的灵敏度通常使用LSB/g或mg/LSB表示。

0g偏置表示在没有加速度(零输入)时输出的水平。模拟输出的传感器通常使用伏特或毫伏表示,数字输出的传感器使用码字表示。模拟输出的传感器0g偏置在指定供电下给出,和供电成比例关系(通常0g偏置是供电电压的一半)。
噪声密度是噪声输出的功率谱密度,使用ug/√Hz RMS表示。总噪声可以根据以下式子计算。总噪声=噪声密度×SQRT(1.6×BW)。BW表示加速度传感器带宽,可以通过传感器输出引脚电容设定。
“
非线性在理想的情况下,传感器输出电压与加速度之间的关系是线性的,由灵敏度表示。非线性表示与完全恒定灵敏度的测量偏差,通过满量程范围(FSR)或±满量程(%FS)的百分比偏差表示。如图2。通常情况下,FSR= FS+ FS。ADI的加速度传感器的非线性足够低,所以通常可以被忽略。
”
封装调准误差是传感器测量轴与参考的封装特征间的角度,如下图。“输入轴对齐”是用于这个误差的另一个术语。通常使用“度”来表示。
正交调准误差是多轴角速度传感器各轴间角度与理想的角度(通常是90度)的误差,如下图。ADI的角速度传感器通过在一个硅片上使用光刻方法制造,轴与轴之间的对准误差通常不是问题。
跨轴灵敏度是当加速度施加到另一个轴时,在一个轴上输出测量值。通常使用百分数表示。

α 是传感器轴和封装间角度,θ 是传感器轴间和正交角度之间的误差
良好的振动抑制特性使能系统级低误差
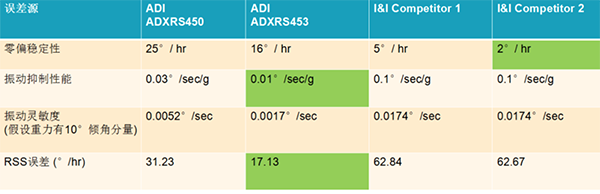
较高的零偏稳定性 + 较低的振动灵敏度 = 较低的系统误差
注意: 振动灵敏度通常是系统里的最大误差源,并且无法校准。即使增加橡胶等“减震”处理也无法改善重力加速度所带来的影响。