突破约束!精密双极性电源设计原来可以这么简单
selina -- 周四, 01/24/2019 - 18:38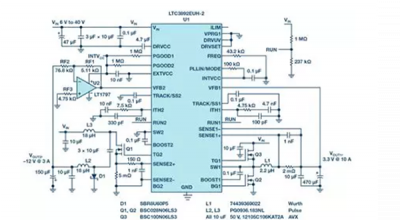
工业、汽车、IT和网络公司是电力电子、半导体、器件和系统的主要购买者与消费者。这些公司使用各种可用的DC-DC转换器拓扑结构,采用不同形式的降压、升压和SEPIC结构。理想情况下,这些公司会针对每个新项目使用专门的控制器。
然而,采用新芯片需要大量投资,因为必须花费很多时间和成本来测试新器件是否符合汽车标准,以及验证其在特定应用、条件和设备中的功能。显然,为了降低开发和设计成本,不同应用应采用已经过批准和验证的控制器。
用于生成电源的最常用拓扑结构是降压转换器。但是,这种拓扑结构仅限于从高于输出的输入电压产生正输出。当输入电压低于输出电压时,不能直接利用它来产生负电压或提供稳定的输出。产生输出的这两个方面在汽车电子中均很重要,因为需要负电压来为放大器供电,或者当输入电压轨显著降低时,在冷起动的情况下整个系统必须连续正常工作。今天我们详细介绍在SEPIC、Cuk和升压转换器中使用简单降压控制器的方法。
从公共输入轨产生负电压和正电压
图1显示了基于单个降压控制器(具有两路输出)的双极性电源设计。