【ADI工程师博客】功能安全与安防
selina -- 周五, 07/13/2018 - 09:01
作者:Tom-M
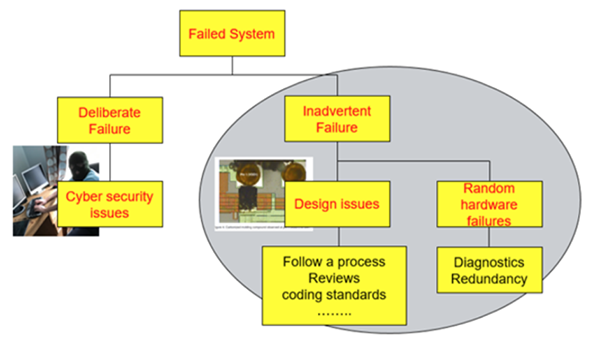
功能安全重在保护人员、资产和环境免受非恶意行为者造成的无意伤害,例如不良规划、不良实施、一组不良的要求或随机故障。
而网络安全重在防范恶意行为者造成的伤害。某人刻意引起系统发生故障,借此获取一些好处。
功能安全重点关注“事故”和“闪失”,安防主要应对故意为之的“黑客”行为,因此需要以不同的方式来思考。例如,考虑哪些有可能发生,比考虑什么会不会发生更重要。
很多语言只有一个词来概括安全和安防。例如,在德语中是Sicherheit。因此,我一般尽量说“网络安全”,而不说“安防”,以便更明确地表达我的意思。
所有具有功能安全要求的系统都有安防要求。功能安全至少要防范可预见的滥用,有人盗用系统即属于该类别。有很多系统的安防要求与安全无关。因此,具有功能安全要求的系统是具有安防要求的系统的一个子集。