差分数据传输:有何区别?
selina -- 周二, 11/29/2016 - 10:44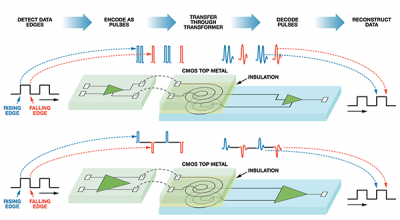
作者:David Carr
隔离器的主要功能是通过电气隔离栅传送某种形式的信息,同时阻止电流。隔离器采用绝缘材料制造,可以阻止电流,隔离栅两端都有耦合元件。信息通常在传输通过隔离栅之前由耦合元件编码。
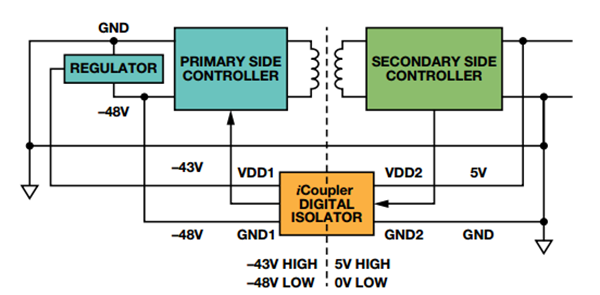
ADI公司的iCoupler®数字隔离器使用芯片级微变压器作为耦合元件,将数据传输通过高质量聚酰亚胺隔离栅。iCoupler隔离器中主要使用两种数据传输方法:单端和差分。选择数据传输机制时,需要进行工程设计取舍,以优化所需的终端产品特性。在单端数据传输中,我们使用变压器,初级绕组的一端接地。
输入信号中的逻辑转换编码为脉冲,相对于地面始终为正极性,位于发送器芯片上。这也称为“一脉冲两脉冲”,因为上升沿编码为两个连续脉冲,而下降沿表示为单个脉冲(请参见图1顶部)。隔离栅另一端的接收器接收到信号,并确定发送了一个还是两个脉冲;然后,它将会相应地重构输出。差分数据传输使用真差分方式的变压器。在此情况下,当检测到输入沿时,始终都发送单个脉冲,但脉冲的极性会决定转换是上升还是下降(图1底部)。接收器为真差分结构,并根据脉冲极性更新输出。