电路功能与优势
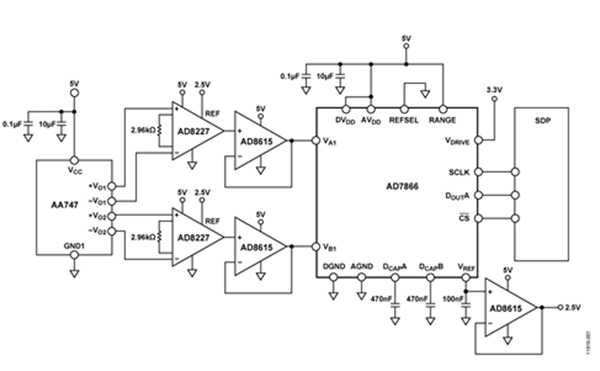
图1所示电路提供非接触式AMR(各向异性磁阻)角度测量解决方案,可在180°范围内具有1°角度精度。该电路适合高速、精确、非接触式角度测量应用。
电路提供全部必要的信号调理,包括仪表放大器、缓冲器和双通道ADC,可高效处理 AMR传感器的低电平电桥输出。
使用该电路是一种业界领先的角度测量解决方案,适用于机床速度控制、起重机角度控制、电机速度测量和其他工业或汽车应用。
电路描述
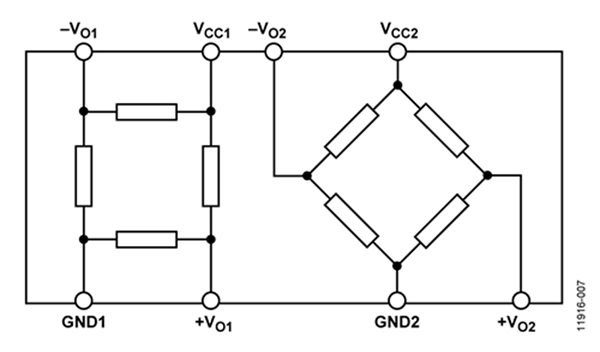
Sensitec AA747是一款基于AMR的角度传感器,集成两个电流隔离式惠斯登电桥,互相之间的相对角度为45°。 AA747具有最低失调电压(±2 mV)和高信号幅度(65 mV)。旋转磁场激励传感器,使其输出±65 mV电压。
AD8227 仪表放大器放大目标信号,同时抑制2.5 V惠斯登电桥共模电压。驱动VREF引脚至2.5 V可将仪表放大器的共模输出电压设为2.5 V。 2.96Ωk增益电阻将增益设为32。这样可以产生0.2 V至4.8 V模拟输出电压(电桥输出为2.5 V ±70 mV)。
电路信号带宽由AD8227确定,其在增益32下具有大约100 kHz带宽。
单位增益运算放大器 AD8615 缓冲仪表放大器输出电压,并直接连接ADC。该缓冲器具有轨到轨输出级,可在电源供电轨200 mV范围内摆动。
AD7866 是一款双通道12位1 MSPS SAR ADC。RANGE引脚的极性确定模拟输入范围和输出编码。如果片选信号变为低电平时该引脚连接逻辑高电平,则下一次转换的模拟输入范围为0 V至2VREF(0 V至5 V),为缓冲放大器的0.2 V至4.8 V输入信号提供大约200 mV裕量。
将REFSEL引脚连接至低电平可配置ADC使用内部2.5 V基准电压源。VREF引脚提供该电压,但必须将其缓冲后才能用于驱系统其它环节。 DCAPA引脚和DCAPB引脚采用470 nF电容去耦,确保ADC正常工作。基准电压由AD8615缓冲,并设置仪表放大器AD8227的共模输出电压。
AD7866同步采样磁阻传感器的两个通道。数字字通常在DOUTA和DOUTB端提供。每个数据流包括1个前导零,随后是3个状态位,再加上12位转换数据。然而,保持片选信号为低电平并持续额外16个时钟周期,则两个数字字均可从一个通道(DOUTA)读取。
SPI接口允许在一条数据线路上访问两个通道。
磁阻(MR)理论
磁阻效应是存在外部磁场时,材料改变其电阻值的能力。最常用的MR传感器基于各向异性磁阻(AMR)效应。
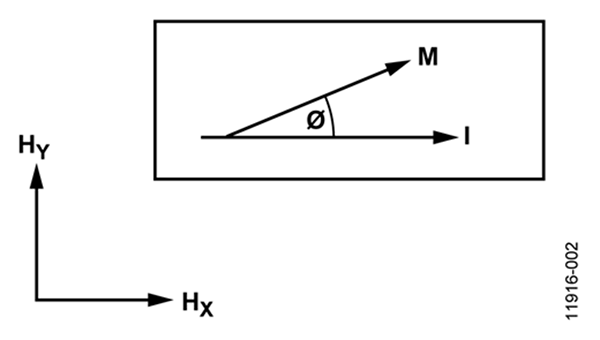
AMR效应示例如图2所示。电流(I)流过导体,受到外部磁场(HY)影响。导体电阻的变化与磁化矢量(M)和电流矢量(I)之间的角度(Ø)成函数关系。磁化矢量是内部磁场(HX)与施加的外部磁场(HY)的净求和结果。
当磁化矢量(M)与电流矢量(I)平行时,具有最大电阻。当磁化矢量(M)与电流矢量(I)垂直时,具有最小电阻。
有效利用AMR效应要求导体自身必须对机械应力不敏感,但对磁约束敏感。由于这些原因,透磁合金(80%镍,20%铁)是AMR传感器制造中最常用的合金。
透磁合金属性
透磁合金条有两个属性,创建角度测量系统时会具有设计挑战性。
首先,透磁合金具有较窄的线性工作区(见图3)。仅当磁化矢量(M)和电流矢量(I)之间的角度(Ø)变大时,响应才是线性的。不幸的是,线性响应不久后就会饱和。
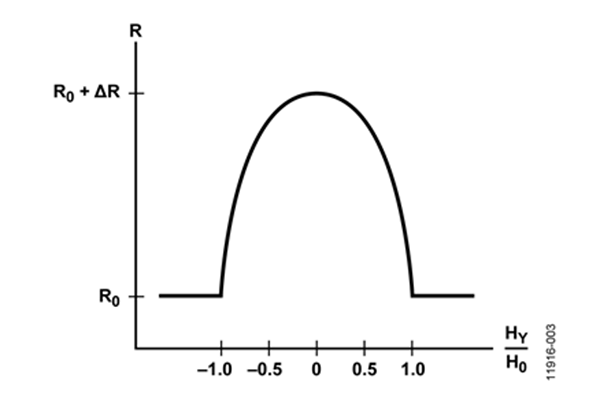
其次,透磁合金对极性不敏感。无论磁化矢量(M)和电流矢量(I)之间的角度(Ø)是正或负,透磁合金条的电阻都将下降。
双色条磁极
改善透磁合金条线性度和磁极非敏感特性的常用方法是与金属条的轴向成45°角添加铝条(称为双色条磁极,如图4所示)。双色条磁极间流动的任何电流都将走最短的路径——垂直路径,并且电流矢量(I)和磁化矢量(M)之间的角度偏移45°。
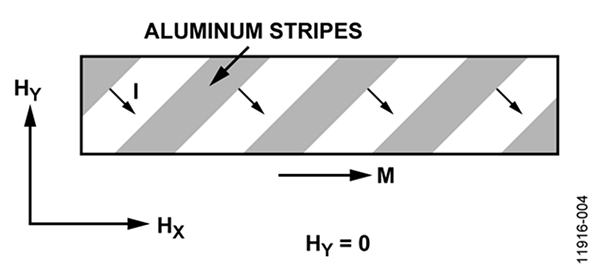
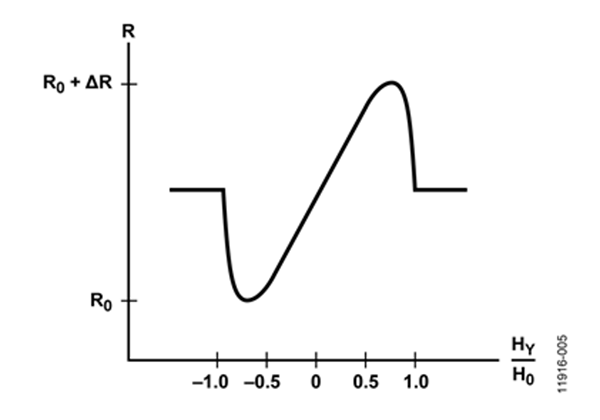
图5显示向透磁合金条中加入双色条磁极后的结果。电流矢量偏移45°,但磁化矢量保持不变。注意,线性特性现在存在于图形的中央部分。
磁场强度
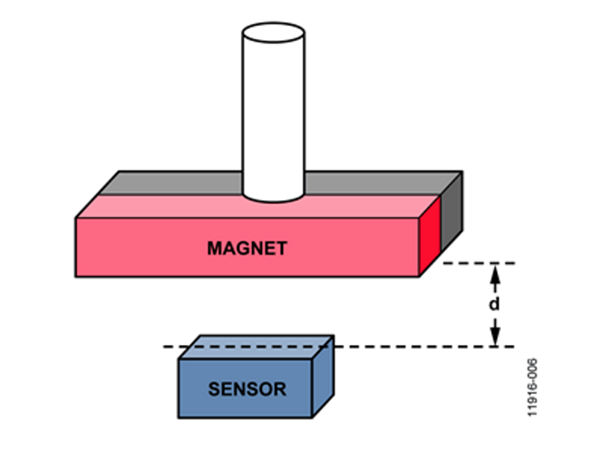
AA747磁阻传感器所需的磁场强度至少为25 kA/m,才能确保数据手册中的误差规格。该激励磁场必须与传感器封装的中央部分相交。
选择磁体时,需考虑传感器和磁体之间的气隙,如图6所示。如果磁体未靠近传感器放置(即距离d极大),则可能需要更强的磁场强度才能确保传感器位置的磁场强度达到要求,并保持最小误差规格。
传感器基础知识
标准AMR传感器由两个惠斯登电桥组成,互相之间的相对角度为45°。透磁合金条包含两个电桥的全部元器件,标称电阻值为3.2 kΩ.
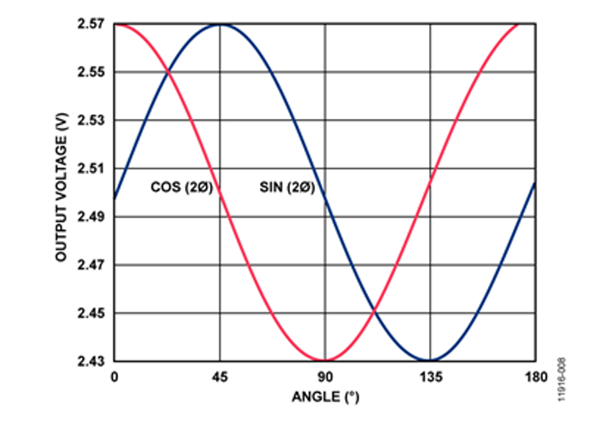
AA747的最大峰值信号幅度为70 mV(14 mV/VCC,5 V电源)。传感器失调电压为±10 mV(±2 mV/VCC,5 V电源),输出2.5 V ±0.70 mV可用信号。旋转磁场产生正弦(2ø)和余弦(2ø)输出信号,如图8所示。两个信号在180°范围内均为周期信号,因此无法在不增加额外电路和原件的情况下进行全方位360°测量。
通道灵敏度
每通道的传感器标称灵敏度为2.35 mV/°。这意味着磁化矢量和传感器方向之间的每一度变化都会产生2.35 mV的输出电压改变。角度的灵敏度并非常量。灵敏度下降的部分是线路斜率接近零时的输出部分。
如图8所示,通道1(蓝线)在磁化矢量接近45°或135°时损失灵敏度。类似地,通道2(红线)在磁化矢量接近0°和90°时损失灵敏度。幸运的是,当一个通道的灵敏度降低时,另一个通道将处于高灵敏度区域。
软件利用了这一特性,并基于某一时刻最为精确的传感器测量角度。如果通道1接近45°,则使用通道2计算角度,保证系统精度。
系统带宽、磁场旋转
磁场角度矢量是理解电路带宽的重要内容。ADC每微秒转换一个样本。为了获得1°分辨率,磁场每微秒只能移动一度(2.778 kHz),否则ADC无法以足够高的速度进行采样,以便跟上磁场变化的速度。对于1 MSPS ADC,这表示磁场的最大可用角速度为2.778 kHz。
测试结果
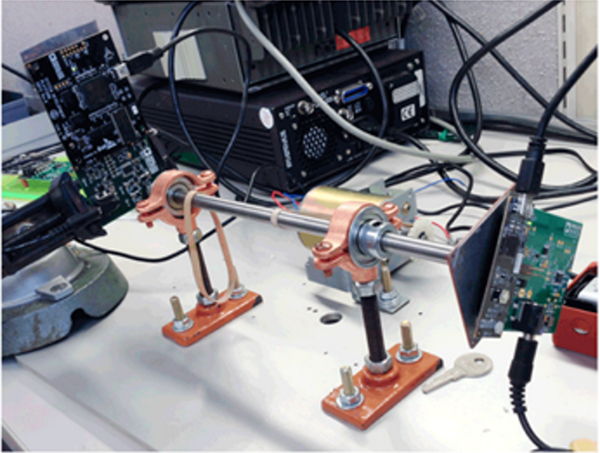
将一永磁铁至于一根轴的端面,该轴可以沿轴向360°自由旋转,安放EVAL-CN0323-SDPZ 使其AA747 AMR传感器(U5)正面与磁体正面平行。EVAL-CN0189-SDPZ (倾斜角测量板)PCB与轴的另一端面紧固连接,这样当轴旋转时,永磁铁和EVAL-CN0189-SDPZ PCB都与轴一同旋转。 图9显示该设置的功能框图;图10显示该设置的照片。
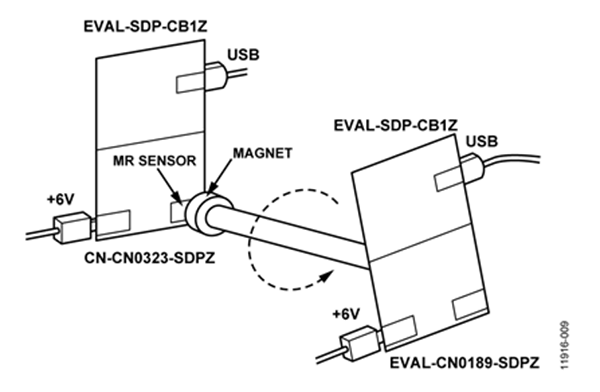
CN-0189 倾斜测量系统提供测试CN-0323的参考角度。中心磁杆转动,直至CN-0189评估软件读取0°。中心磁杆保持该位置,而磁体旋转,在CN-0323评估软件中产生0°角度读数。
将磁体中心与IC正面的中心位置对齐放置很重要。若不对齐,将会使磁场偏离传感器,并导致CN-0323评估软件最终计算角度时产生误差。
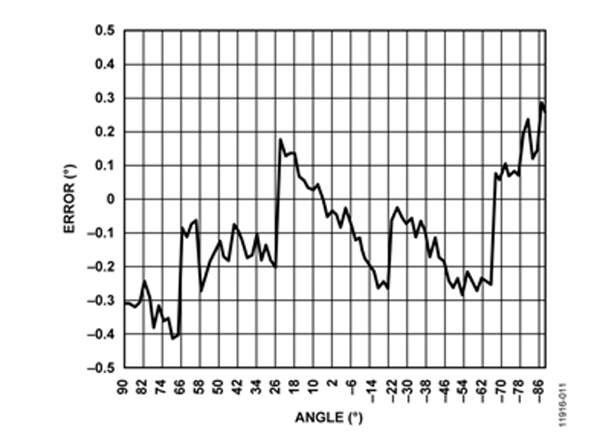
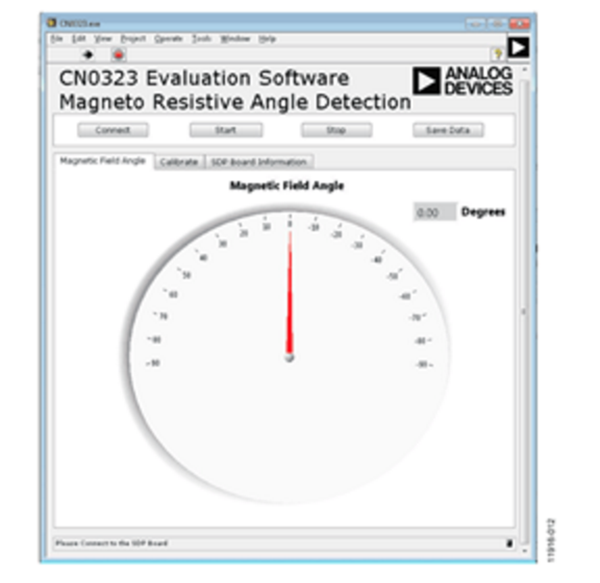
转动中心磁杆并将评估软件的两个显示读数进行比较,即可收集数据。图11显示±90°范围内记录的输出角度误差。整个范围内的误差为±0.4°。LabVIEW评估软件见图12。
评估软件上的校准选项卡确定每个惠斯登电桥的最大和最小电压输出(VMAX和VMIN)。了解这些数值可以更精确地将电压映射到数字码。用户有两种方法可以确定VMAX和VMIN值。
第一种方法是手动输入数值。第二种方法是在180°范围内转动磁体,同时让软件自动鉴别数值。这种方法比手动鉴别数值更快,但如果磁场转动过快则会产生误差。
PCB设计考虑
在任何注重精度的电路中,必须仔细考虑电路板上的电源和接地回路布局。PCB应尽可能隔离数字部分和模拟部分。本系统的PCB采用4层板堆叠而成,具有较大面积的接地层和电源层多边形。有关布局和接地的详细论述,请参见指南MT-031; 有关去耦技术的信息,请参见指南MT-101;
所有IC的电源应当用1μF和0.1μF电容去耦,以适当抑制噪声并减小纹波。这些电容应尽可能靠近器件。对于所有高频去耦,建议使用陶瓷电容。
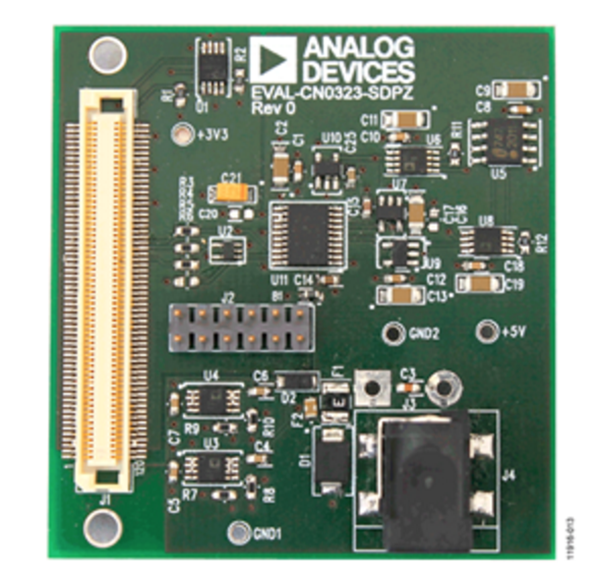
电源走线应尽可能宽,以提供低阻抗路径,并减小电源线路上的毛刺效应。通过数字地将时钟及其它快速开关数字信号屏蔽起来,使之不影响电路板的其它器件。图13为PCB的照片。
有关本电路笔记的完整设计支持包,请参阅 www.analog.com/CN0323-DesignSupport .
常见变化
创建线性位置测量系统时,有两个需要改变的地方。首先是采用AA745代替AA747 AMR传感器。该传感器专门检测线性移动,并具有与AA747相当的电气特性。其次,采用由一系列变化的南北极组成的多极条状磁体代替现有磁体,如图14所示。
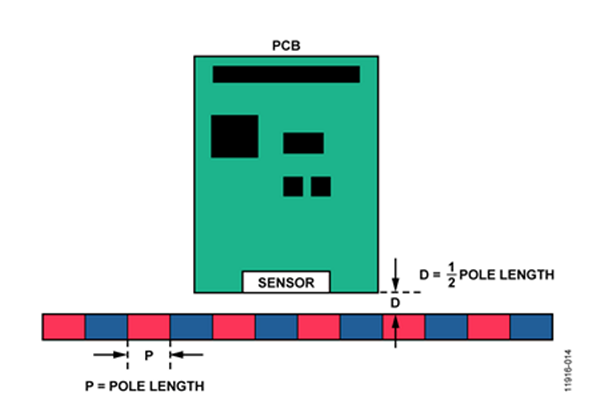
AA745采用水平包装,安装位置与PCB的边缘齐平。这样可实现磁体和传感器之间的最佳距离,理想距离是磁极长度的一半。
随着传感器沿与磁体平行方向移动,传感器将会监测磁场每旋转180°表明传感器沿磁体平行方向一定一个磁极长度。磁极长度(P)和传感器的角度精度(ΔØ= 0.05°)确定理论精度(Δx)。
这样便形成了在一个磁极长度范围以内的绝对测量系统。若磁体有多个磁极,则对通过的磁极进行计数可获得更精确的读数。实现该功能需要更多电子元器件,并且通常具有不同磁极长度的第二个磁体能为额外的传感器提供参照点。
电路评估与测试
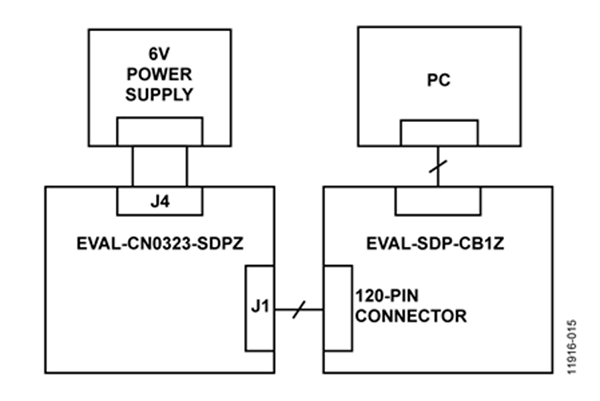
本电路使用 EVAL-SDP-CB1Z系统演示平台(SDP)评估板和EVAL-CN0323-SDPZ电路板。这两片板具有120引脚的对接连接器,可以快速完成设置并评估电路性能。
EVAL-CN0323-SDPZ包含待评估电路,如本笔记所述。EVAL-SDP-CB1Z,与CN-0323评估软件一同使用采集EVAL-CN0323-SDPZ评估板的数据。
设备要求
需要以下设备:
* 带USB端口的Windows® XP、Windows Vista®(32位)或Windows® 7(32位)PC
* EVAL-CN0323-SDPZ 评估板
* EVAL-SDP-CB1Z 评估板
* 6 V电源或壁式电源适配器
* CN-0323 评估软件
* 传感器封装处磁场强度不低于25kA/m的钕磁体。
开始使用
将CN-0323评估软件光盘放入PC中,加载评估软件。打开我的电脑,找到包含评估软件光盘的驱动器,打开Readme文件。按照Readme文件中的说明安装和使用评估软件。
功能框图
图15所示为测试设置的功能框图。
设置
将EVAL-CN0323-SDPZ上的120引脚连接器连接到E VA L-SDP-CB1Z上的连接器。使用尼龙五金配件,通过120引脚连接器两端的孔牢牢固定这两片板。
在断电情况下,将6.0 V直流管式插孔连接到J4连接器。将EVAL-SDP-CB1Z附带的USB电缆连接到PC上的USB端口。注意:此时请勿将该USB电缆连接到SDP板上的微型USB连接器。
将钕磁体直接放置在IC之上,或置于专为旋转磁体而设计的夹具中,使IC和磁体本身的距离最短。
使磁场的其他来源远离IC很重要,因为任何杂散磁场都会使传感器输出电压产生误差。
测试
为直流管式插孔、J4连接器上电。启动CN-0323评估软件,并通过USB电缆将PC连接到EVAL-SDP-CB1Z上的微型USB连接器。
一旦USB通信建立,就可以使用EVAL-SDP-CB1Z来发送、接收和捕捉来自EVAL-CN0323-SDPZ的串行数据。
有关EVAL-SDP-CB1Z的信息,请参阅SDP用户指南。
有关测试设置、校准以及如何使用评估软件来捕捉数据的详细信息,请参阅CN-0323软件用户指南: www.analog.com/CN0323-UserGuide 。