【导读】永磁无刷电动机是随着计算机技术、电子技术和控制技术的进步而发展起来的一种高性能机电一体化的产品。它具有能量密度高、效率高、惯量小等优点被广泛应用于伺服系统、数控机床、医疗器械、航空航天及军事装备等领域, 随着永磁材料和功率电子器件的不断进步, 其应用范围越来越广。永磁无刷电动机由电动机本体及驱动控制器组成, 通常在电动机本体中装有供换向位置检测的霍尔元件, 并与电动机共磁场, 这时, 各相霍尔片如何正确定位, 才能使无刷电动机得以正确换向以获取较佳的工作特性? 本文以齿数Z = 12, 极对数 p =5的无刷电动机为例, 讨论霍尔 S 41的定位原则和方法。
1、无刷电动机霍尔片定位原则
无刷电动机导电顺序是由三相霍尔换向并结合逻辑线路或软件实现的。三相霍尔无刷电动机的三相绕组输入波形和三相霍尔输出波形如图1所示。
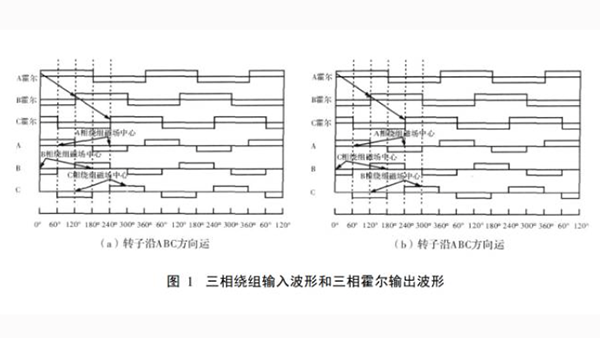
图 1中, 各相绕组导通角不论转向正反, 均为120电角度, 各相正向导通由本相霍尔片上跳造成的(换向点), 120反跳由线路保证, 各相反向导通由本相霍尔片下跳保证。为了保证较佳的工作特性,各相120的中间点为各相的绕组磁场中心, 显然,各相霍尔片要超前该相的绕组中心60电角度对该相绕组进行换向操作, 这就是无刷电动机的60霍尔片定位原则。
由于每极每相每一转向总存在一个换向点, 这样, 对于p对极电机, 每相每一转向存在2p 个换向点, 这2p 个换向点沿圆周均布, 三相电机共有6p个霍尔片换向点位置。如果先用磁场中心定位法精确决定一个特征点, 其他换向点也就可以确定, 我们在定子圆周上确定画出6p 个霍尔片换向点位置,及正反放置状态, 制成所谓的!霍尔圆图∀, 霍尔圆图上角度为机械角度。当然, 使用时, 各相取一个霍尔点放置霍尔片就可以了。对于定子斜槽, 这些换向点指的是定子铁芯轴向中间位置, 对于转子斜槽, 图中的磁极指的是转子轴向中间位置的磁极。故本文所指磁场中心定位法决定的特征点就是处于电机定子的齿中心或槽中心。
图 1( a)中磁钢运动方向为 A, B, C, 图中可以看出, A相霍尔片上跳位置正好是B 相的绕组磁场中心, A相霍尔片要放在B相的绕组磁场中心上,就是A 相霍尔片的特征点在B 相的绕组磁场中心上。图1( b)中磁钢运动反方向为 A, C, B, 图中可以看出, A 相霍尔片上跳位置正好是 C 相的绕组磁场中心, A 相霍尔片的特征点在 C相的绕组磁场中心上, 上一相霍尔中心, 按转向放在转子转过120的下一导通相绕组磁场中心上, 如ABC方向转动时, A 相霍尔放在 B相磁场中心。

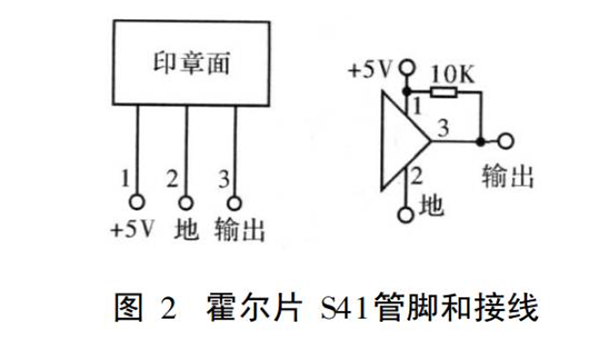
这就是说, 某相霍尔片的特征点是在另2相的磁场中心, 绝不在本相磁场中心, 由转向最后决定该相霍尔片的特征点是在其他2 相中的某相磁场中心, 这也是无刷电动机霍尔片的磁场中心定位法。霍尔片采用开关型的S41。S41管脚和接线如图2所示。
霍尔片接入电路, 转子N 极向某换向点上的霍尔片移动, 要求该霍尔片输出逻辑高电平, 霍尔片的印章要朝磁极, 霍尔片移出磁场, 它仍维持高电平, 只有移入S极下该霍尔片输出才能转为低电平, 所以, 图1中霍尔片输出波形为180。转子S 极向某换向点上的霍尔片移动, 要求该霍尔片输出逻辑高电平, 霍尔片的印章要背朝磁极, 只有移入N 极下该霍尔片输出才能转为低电平。霍尔片的印章朝磁极, 霍尔片为正向放置; 霍尔片的印章背朝磁极, 霍尔片为反向放置。这样, 2p 个换向点上霍尔片就有正、反放置的问题, 因为转子 N、S磁极沿圆周相互穿插排列, 在定子上, 霍尔圆图霍尔片沿圆周正、反放置也是相互穿插排列。
2、霍尔片定位-霍尔圆图
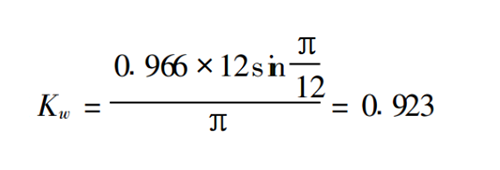
以齿数Z = 12, 极对数 p = 5内转子单层绕组三相无刷电动机为例具体例示其霍尔片定位, 画出它的霍尔圆图。当 Z = 12, p = 5无刷电动机定子绕组按槽序号逆时针排列时, 电机的槽矢量图如图3( a)所示, 槽矢量图上, 电机定子铁芯相邻槽间电角度为 360[1]# 5 ∃12= 150。在槽电势矢量图上最小分度为 360[1]∃12= 30, 矢量图上电机每相占槽数为 4槽, 按 60分相: A 相 1, 2- ,7 - , 8槽; B相3- , 4, 9, 10- 槽; C相 5, 6 -, 11 -, 12 槽; 负号表示槽电势矢量反向。图 3( b)所示, 对 A 相全部槽电势矢量合成, 求出A 相电势矢量, 并算出电机绕组系数K w = cos15= 0966,考虑斜槽 30电角度,包括斜槽的绕组系数
由于A 相磁场中心与A 相电势矢量垂直, 得出A 相的磁场中心在槽1, 槽2间的齿中心及槽7, 槽8间的齿中心上; 在图3( c)上, 因为B、C相磁场中心与A 相的磁场中心沿绕组逆排列方向分别相差120和240, 得出 B相的磁场中心在槽 3, 槽 4间的齿中心及槽 9, 槽10间的齿中心上; C相的磁场中心在槽5, 槽6 间的齿中心及槽11, 槽 12 间的齿中心上。
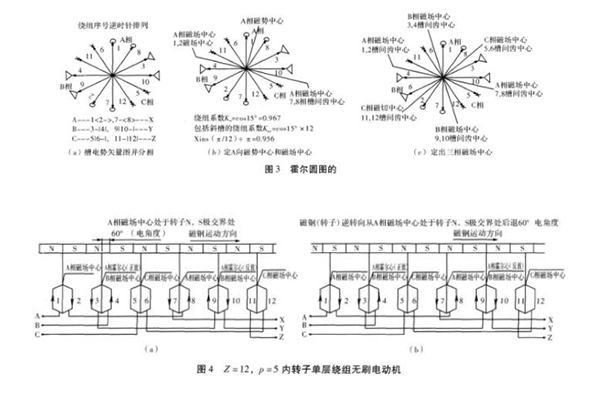
图 4( a)是 Z = 12, p = 5内转子单层绕组无刷电动机定子绕组分布、接线和转子磁钢分布图。该图上定、转子相对位置处于 A 相磁场中心与磁钢磁场中心正交, 这时, A相磁场中心处于转子N、S磁极交界面上, 转子磁钢运动方向如图的ABC方向(逆时针方向)。根据无刷电动机60霍尔片定位原则,在图4( a)上将转子逆转子磁钢运动方向后退 60电角度, 如图 4( b)所示, 这时, B相磁场中心处于转子 N、S磁极交界面上, 如果一片霍尔片正放于B相磁场中心的3 槽、4槽间齿中心, 另一片霍尔片反放于B相磁场中心的9槽、10槽间齿中心, 转子沿磁钢运动方向一转动, 该两片霍尔片输出电压上跳, 使A 相正向通电, 所以, B相磁场中心是A 相霍尔片中心, 3槽、4槽间齿中心A 相霍尔片要正放, 9槽、10槽间齿中心霍尔片要反放, 显然, 图4( a)上转子磁钢异极交界处往左移动 60电角度, 磁钢异极交界处对应定子内孔位置, 均是A 相霍尔片安放中心, 此时, 磁钢运动方向霍尔接触S极反放,接触N 极正放。A 相霍尔片在定子圆周上, 有2p =10个位置, 相邻片放置是一正一反。特征点在 3, 4槽间齿中心, 霍尔片正放。根据 ABC逆时针排列,我们画出ABC三相霍尔特征的位置及正反图如图5所示。由此, 我们画出3 相霍尔片在定子圆周上所有霍尔片位置及正、反放置如图6 所示。
图中,( a)、 ( b)、 ( c)三图分别为 A、B、C相霍尔片在定子圆周上所有霍尔片位置及正、反放置, 而图5( d)就是 Z = 12, p = 5内转子单层绕组无刷电动机在定子绕组按槽号逆时针排列逆时针旋转时三相霍尔片所有可安放的位置图, 也就是它的霍尔圆图。在这个霍尔图上有3mp = 30 个霍尔中心沿圆周均布,ABC三相正放霍尔片按槽序号逆时针排列彼此相隔120电角度, ABC三相反放霍尔片按槽序号顺时针排列也彼此相隔 120电角度, 相邻不同相的霍尔放置也是正、反相隔的。所以, 我们能定出A 相一个霍尔片正放(或反放)位置, 由绕组按槽序号排列方向就可画出整个霍尔圆图。

3、结语
Z = 12, p = 5单层绕组无刷电动机定子绕组按槽号有逆时针排列, 也有顺时针排列, 各种排列转子有顺时针旋转, 也有逆时针旋转, 它们由各自的霍尔圆图。当使用霍尔元件作无刷电动机位置传感器, 并与无刷电动机共用同一磁场, 这时, 各相霍尔片正确定位就可使用三相霍尔圆图, 根据机械安装等要求, 在三相霍尔圆图上三相各取一个霍尔位置点, 作为霍尔片安放位置, 就可以了。这里要注意, 霍尔片按印章面相对转子有正, 反放的问题。这时, 霍尔片与无刷电动机共用同一磁场, 放在定子上靠近转子磁钢处。
本文转自:永磁无刷电动机霍尔片的定位方法