David Brandon 和 John Cavey
残余相位噪声测量法消除了外部噪声源(例如电源或输入时钟)的影响,而绝对相位噪声测量法包含了这些来源的噪声。残余相位噪声装置可以隔离并测量器件的相加相位噪声。利用此信息,设计师可在信号链中选择各个器件,以满足整个系统的相位噪声要求。本文包含了定时器件的相位噪声图,以突出残余相位噪声装置的属性。此外,它还说明了如何使用相加相位噪声来识别信号链中的噪声问题来源。
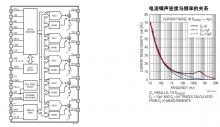
图 1 显示了用于测量待测器件 (DUT) 的相加相位噪声的装置。请注意,使用了两个 DUT;每个 DUT 均连接到公用电源和输入时钟。这些公用噪声源产生的相位噪声在每个 DUT 输出处相关联。通过简单地将相位检测器建模成为一个具有与增益 KPD 的模拟乘法器,可以得出输出相位噪声:
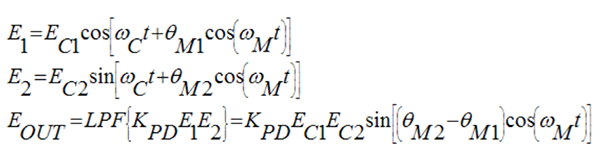
其中 E1 是经过放大的 DUT1 输出信号,E2 是经过放大和延迟的 DUT2 输出信号,EC1 和 EC2 是信号功率,θM1 和 θM2 是相位噪声的幅值,ωC 是载波频率,ωM 是偏置频率。应用叠加,因此当考虑来自外部源的相位噪声时,DUT 固有的相位噪声可以忽略不计。如果 DUT1 和 DUT2 具有相同的超量相位传递功能,则由时钟源和电源产生的 θM1 部分等于由公用时钟源和电源产生的 θM2 部分。这种现象称为电源牵引,可以简单地通过以下方程式描述:
这样,相位调制的幅度可由电源上的电压噪声与 KP 的乘积 - 电源牵引增益(弧度/V)得出。如果 DUT1 和 DUT2 具有等效的电源牵引增益,则理论上可以取消相位检测器输出处的这些噪声源,从而只留下两个 DUT 的无关噪声以进行测量。