作者:Jakub Szymczak、Shane O’Meara、Johnny S. Gealon和Christopher Nelson De La Rama
旋变器和机电传感器可用来精确测量角位置,以可变耦合变压器的方式工作,其初级绕组和两个次级绕组之间的磁耦合量根据旋转部件(转子)位置而改变;转子通常安装在电机轴上。旋变器可部署在工业电机控制、伺服器、机器人、混合动力和全电动汽车中的动力系统单元以及要求提供精确轴旋转的其他许多应用中。旋变器在这些应用中可以长期耐受严苛条件,是恶劣环境下军用系统的完美选择。
标准旋变器的初级绕组位于转子上,两个次级绕组位于定子上。而另一方面,可变磁阻旋变器的转子上无绕组,其初级和次级绕组均在定子上,但转子的凸极(裸露极点)将次级正弦变化耦合至角位置。图 1 显示经典和可变磁阻旋变器。

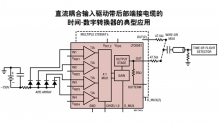
如等式 1 所示,当正弦信号激励初级绕组R1 – R2 时,在次级绕组上会产生一个感应信号。耦合至次级绕组的信号大小与相对于定子的转子位置成函数关系,其衰减系数称为旋变器转换比。由于次级绕组机械错位 90°,两路正弦输出信号彼此间的相位相差 90°。旋变器输入和输出电压之间的关系如等式 2 和等式 3 所示。等式 2 为正弦信号,等式 3 为余弦信号。
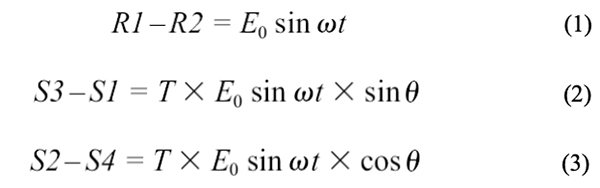
其中,θ是轴角,ω是激励信号频率,E0 是激励信号幅度,T是旋变器转换比。两路输出信号由轴角的正弦和余弦信号调制。激励信号以及正弦和余弦输出信号的图示如图 2 所示。正弦信号在 90°和 270°时具有最大幅度,余弦信号在 0°和 180°时具有最大幅度。