《机电伺服系统在低频模态负载状态的极限环谐振现象影响因素分析》
供稿:京精密机电控制设备研究所
汤力、李清、冯立墨、杨艳丽
摘 要:
针对机电伺服系统在低频模态负载状态发生极限环结构谐振现象进行机理分析,辨识负载效应模型,针对性进行避免极限环结构谐振的试验,并对试验效果进行分析。仿真和试验结果表明,该方法能使系统负载谐振频率得到提高,极限环结构谐振现象消失,显著改善伺服系统的动态性能。
1、概述
近年来,随着数字集成电路、功率器件、稀土永磁电机等电力电子技术的飞速发展,机电伺服及其控制技术得到了广泛应用。
机电伺服系统在飞行器发动机推力矢量控制应用方面,理想表现是响应迅捷,动态性能稳定,精度高。但实际上伺服系统的快、稳、准三项指标是互为矛盾的联合体。
为满足高动态性能的要求,机电伺服系统一般采用提高增益的方法,但高增益在面对非线性低频模态负载状态时易出现系统谐振,且该谐振现象由于受非线性的影响,发生的规律性不强,难以从线性系统稳定性判据的方法进行分析。
结构谐振与伺服电气系统谐振发生耦合易导致系统出现低频率、小阻尼系数的综合谐振。该综合谐振严重影响伺服系统的稳定性并限制系统的带宽,而伺服带宽是限制跟踪误差和过渡过程品质的主要因素。伺服带宽受到系统综合和结构谐振特性的双重限制。本文所述机电伺服系统谐振典型曲线如下图1所示。
以往的研究均通过间隙描述函数和动量定理分析含间隙系统驱动大惯量负载时产生的极限环振荡问题,但这一方法需要解决如何确定两个传动体的等效质量问题,而在具有多个传动件的系统中,难以确定等效质量。
飞行器发动机作为推力矢量机电伺服系统的负载,同样是决定伺服系统性能的重要因素,发动机的负载模型包含了间隙、阻尼等多种非线性特征,难以通过解析的方法获得。为满足伺服系统的研制与生产的需要,负载模型的辨识至关重要,它被用来模拟系统工作过程中伺服系统的负载情况,主要包括惯性负载、弹性负载、摩擦负载和常值力矩[6-11]。
本文通过对负载及负载效应进行试验辨识,分析了机电伺服系统在低频模态负载状态下极限环结构谐振的机理及预防措施。
2、机电伺服系统在负载状态下的模型辨识
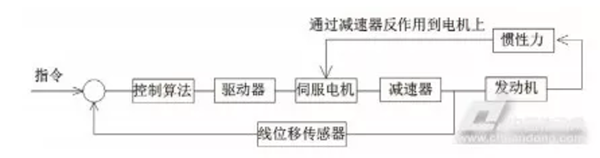
机电伺服系统与液压伺服系统原理基本相同,其中,机电伺服系统通过控制电流的大小和方向实现对伺服电机的控制,并通过一定减速机构将高转速低扭矩的伺服电机的运动转化成大扭矩、低转速的运动。根据系统综合设计,测量转角并参与闭环反馈的传感器没有安装在整个运动链路的最后一级上,而是安装在伺服系统的运动输出界面上,因此,伺服对发动机的推力矢量控制在全局层面是一个半闭环的控制回路,其基本结构如下图所示。
以某带有小型液体发动机负载的机电伺服系统为例,伺服系统输出轴与发动机负载力学模型如下图3。

负载力平衡方程为:

其中, JL 为等效负载转动惯量; Ksr为等效负载刚度;TL为负载力矩,根据液体发动机的特点,负载力矩构成复杂,包含摩擦力、科氏力、推力偏斜造成的附加力矩等主要因素,与摆角相关性不大,为简化模型,按恒值考虑;Bp为等效负载阻尼。
对上式进行Laplace变换,得
由上式可知,伺服系统负载是典型的二阶环节,其谐振频率为,阻尼比为,因此,负载模型主要由负载等效刚度、负载转动惯量、负载等效阻尼三个物理量决定。负载转动惯量可通过计算得出。负载等效刚度取决于传动环节的传递刚度、间隙及结构本体的安装刚度。负载等效阻尼与润滑、摩擦等密切相关,为非线性。负载等效刚度和阻尼在工程上难以通过解析的方法得出,需进行试验辨识。伺服系统在低频模态负载状态下出现的极限环结构振荡和失稳现象,是典型的闭环控制系统处于临界稳定状态。通过模态分析实验,可以确定被控制对象或系统中各环节特性。
为此,将系统固支安装在固定基础上,对伺服系统施加正弦扫描信号,幅值为1º,频率依次由2Hz到30Hz。测量从伺服系统的运动输出界面到发动机喷管终端的各传动环节响应,计算在指令输入下的频率特性。以伺服系统自身的位移反馈信号(即传统意义上的线位移)为输入对下图中测点1~6的响应进行频率特性测试。
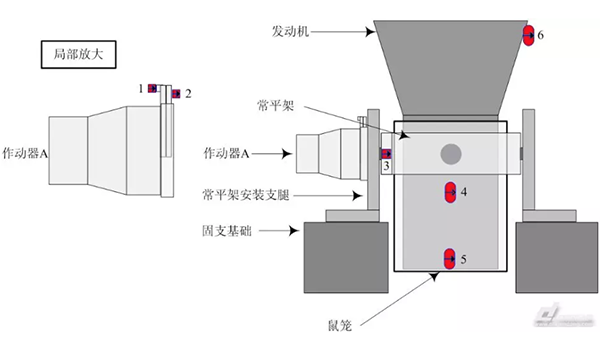
测点位置:1.销钉前端;2.端面齿曲柄前端;3.常平架与作动器连接处;4.鼠笼与转轴连接处;5.鼠笼上端;6.发动机喷管尾部
通过以上方法,得到了以线位移为输入,从伺服系统输出到发动机运动终端各个传动链路上的响应特征,并匹配负载模型参数,得到伺服系统负载模型如下图5。
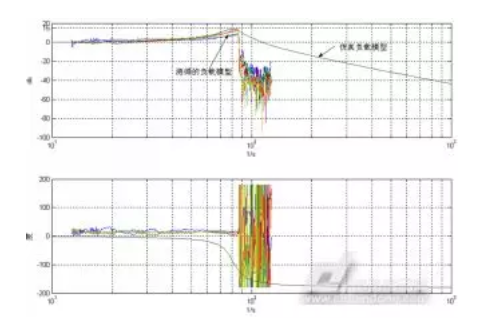
负载效应是伺服系统在真实负载状态下,负载对伺服系统闭环内部进行的反作用,对于该伺服系统的负载效应进行测试,按照闭环传递函数求开环传递函数公式G(S)=Φ(S)/(1-Φ(S)),由闭环动态特性测得计算出开环动态特性。在其它外部状态完全一致的情况下分别在伺服系统无载和负载情况下测得开环特性,后用负载的开环特性减去无载的开环特性,得出负载效应,最后对负载效应结果进行计算和拟合,得出负载效应模型,结果如下图6。
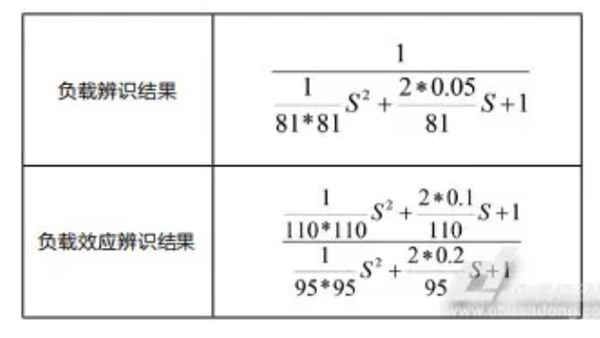
分析可得伺服系统的负载模型和负载效应模型如下表1,其中,机电伺服系统的数学模型在伺服电机、驱动器、减速器、控制算法已知的情况下易通过解析方法获得,本文不再赘述。
表1 负载及负载效应传递函数拟合
3、极限环结构谐振机理
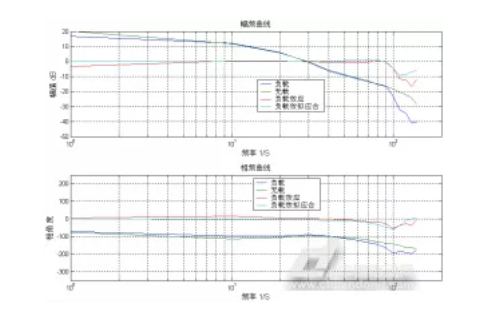
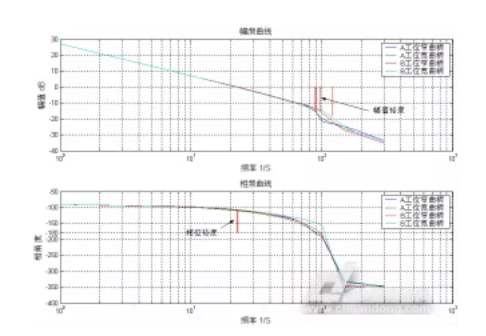
为分析极限环结构谐振的机理,首先从线性系统稳定性裕度方面计算其开环稳定裕度,使用上述数学模型,在开环情况下进行频率特性测试和仿真,得到开环波特图如下图7。
经开环稳定裕度的计算,得出该伺服系统满足线性系统稳定性判据,具备足够的稳定性,为进一步分析极限环结构振荡问题,在闭环状态下,将动态特性分析点设置在发动机喷管角位移上,进行1°动态特性仿真,得到闭环角位移动态特性曲线如下图8。
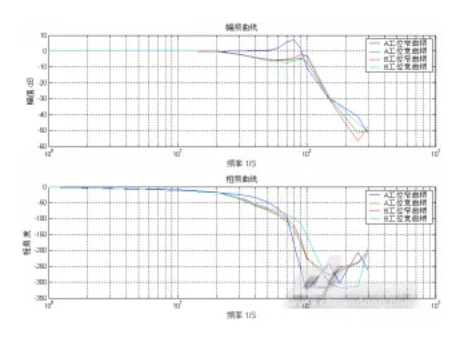
可以得出闭环动态特性出现约+8dB的振荡峰,而此时的相位约-180°,系统容易出现振荡。
通过以上理论分析,判断出导致伺服系统在安装到发动机上后出现极限环结构振荡是闭环系统在-180°相移时出现正振荡峰所致。虽然小信号情况下系统是稳定的,但在传动间隙和功率饱和等非线性环节的综合影响下易出现非线性极限环,而极限环的出现与伺服系统本身的高增益和负载谐振频率较低有关。
4、负载模态及结构优化措施
负载谐振频率和负载阻尼与极限环结构谐振密切相关,当然也可以在伺服系统控制策略上进行优化,比如适当降低增益、加入陷波算法等,但后者以降低伺服系统动态性能为代价的,当负载谐振频率与伺服系统自身带宽接近时,动态性能的损失大。增大负载阻尼虽然削弱了谐振的峰值,但在低频时大的负载阻尼会带来较大的相位滞后,又需提高控制增益来弥补。因此最有效的方法是提高负载谐振频率,使谐振频率出现在伺服系统大幅度衰减的频段。
提高负载谐振频率一般有如下三种途径:提高负载和传动环节刚度;降低传动环节间隙;降低负载转动惯量。
5、试验结果分析
本文采取提高传动环节刚度的办法将负载谐振频率由81rad/s提高到100rad/s,得到负载闭环角位移动态特性曲线,如下图9。
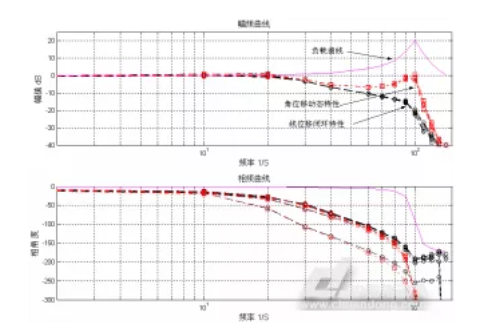
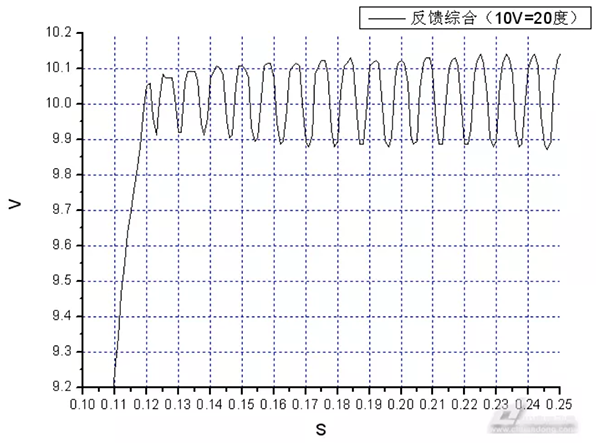
可以得出,传动环节刚度提高后,角位移闭环幅频特性在0dB以下,因此表现为系统稳定。后又将低刚度和高刚度伺服系统分别安装到发动机上,对发动机喷管引入外部激励以进行对比试验,对比试验除刚度不同外,其它完全一致,试演中两种状态的反馈曲线如下图10、图11。(下图纵坐标单位为V,0.1V对应摆角为0.2°)。
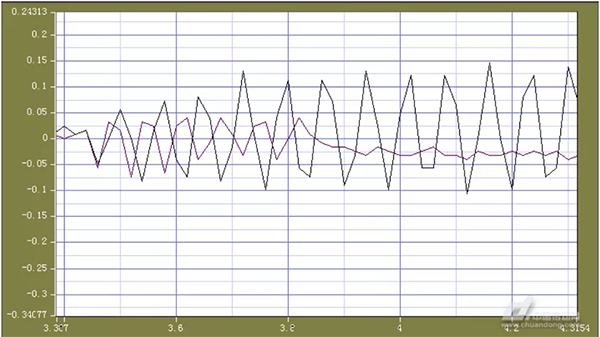
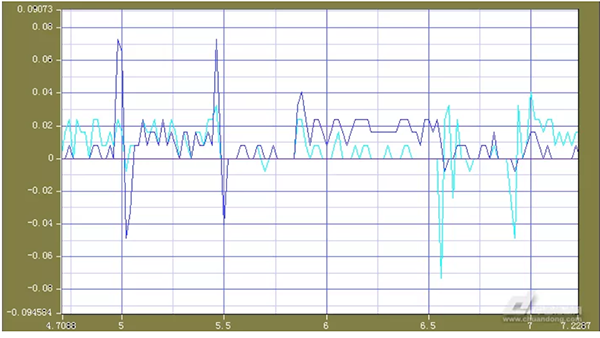
可以得出,在引入外部激励状态下,低传动刚度伺服系统出现持续的谐振,高传动刚度伺服系统未出现震荡(图中的一次波动是由于外部激励引起的正常偏摆)。
6、结束语
本文以发动机推力矢量机电伺服系统为应用对象,研究了机电伺服系统在低频模态负载状态下发生极限环结构谐振的机理,通过辨识的方法建立了推力矢量机电伺服系统负载模型和负载效应模型,在仿真与试验的基础上,探讨了机电伺服系统在低频模态负载状态下发生极限环结构谐振的根本原因,并提出了避免结构谐振的预防措施。结果表明:通过辨识的方法能有效并准确的得出机电伺服系统负载模型和负载效应模型;通过提高系统的负载谐振频率,能在不损失伺服系统动态性能的情况下,有效地使极限环结构谐振现象消失,保证系统的稳定工作。
全文见《伺服与运动控制》
2018年第六期