【知识】伺服的电子凸轮有什么?如何使用?
winniewei -- 周四, 09/01/2022 - 10:20
在传统机械里,轴与轴之间是靠机构来传动的,例如下图所示,主/从轴间以一条平皮带相连,当主轴开始转动,从轴也一起转动!
在传统机械里,轴与轴之间是靠机构来传动的,例如下图所示,主/从轴间以一条平皮带相连,当主轴开始转动,从轴也一起转动!

工业机器人周边运动控制部分主要有伺服控制、步进控制、变频控制三大部分,下面让我们来一一解答这些控制要点。

《机电伺服系统在低频模态负载状态的极限环谐振现象影响因素分析》
供稿:京精密机电控制设备研究所
汤力、李清、冯立墨、杨艳丽
摘 要:

21世纪以来,随着工业4.0、中国智造2025的兴起,工业控制上经常会提出这么一个疑问:“伺服和变频两者之间,究竟有什么不同?” 那么接下来,小编将从以下几个方面来进行比较。如有讲解不到位的,还请各位看官多多包涵。
01、从定义看
首先,从定义上来说,变频器是利用电力半导体器件的通断作用将工频电源变换成另一频率的电能控制装置,能实现对交流异步电机的软启动、变频调速、提高运转精度、改变功率因素等功能。
变频器可驱动变频电机、普通交流电机,主要是充当调节电机转速的角色。
伺服系统是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。主要任务是按控制命令的要求、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制的非常灵活方便。
伺服系统按所用驱动元件的类型可分为机电伺服系统、液压伺服系统和气动伺服系统。最基本的伺服系统包括伺服执行元件(电机、液压缸)、反馈元件和伺服驱动器。若想让伺服系统运转顺利还需要一个上位机构,PLC、以及专门的运动控制卡,工控机+PCI卡,以便给伺服驱动器发送指令。
从定义区分
总的来说,其两者在定义上的区别主要概括为一句话:变频器是以速度控制为目的,而伺服则是以位置控制为目的。

打入行开始就总是会听到有人谈论“伺服和变频之间的区别”,不过我一直觉得,将他们放在一起比较其实是不够严谨的,正如票圈中汉斯总的一段评论所说:
变频其实是指电力传动的工作方式和结构原理,而伺服强调的是控制性能和应用结果,二者并不是同一个范畴内的概念。

伺服系统广泛用于机床工具、纺织机械、印刷机械、激光雕刻机等传统OEM行业。机器人、机床、电子半导体以及风电太阳能等新能源对交流伺服的需求增长较快,不同细分领域的竞争格局差异较大。现代交流伺服系统最早被应用到宇航和军事领域,比如火炮、雷达控制等,后来逐渐进入到工业领域和民用领域。
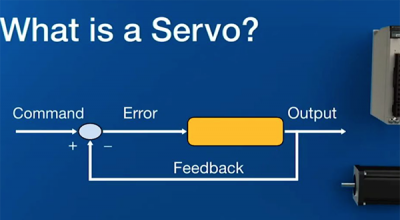
伺服是目前工业制造领域一种十分常见的技术,我们之前也已经谈的比较多了。可是话说,到底什么是伺服呢?本期,咱就来简单的聊一聊。
伺服 Servo 这个词来自拉丁文 “servus”,意思是仆人按照主人的指示行事,并且忠实而快速地工作。

伺服电机是影响机器人工作性能的主要因素,也是我国机器人产业需要突破的关键短板之一。《中国制造2025》规划总体部署了机器人伺服电机的目标:到2020年,性能、精度、可靠性达到国外同类产品水平。
01 伺服机器人市场