【视频】28nm CMOS射频数据转换器
selina -- 周三, 04/24/2019 - 17:06
介绍最新发布的AD9208 RF ADC和AD9172 RF DAC。
介绍最新发布的AD9208 RF ADC和AD9172 RF DAC。

作者:Joel Li和Van Yang
摘要

作者:ADI_bcmaguire
网络边界–高墙即将倒塌。数字革命正在推动连接达到超出传统企业网络的前所未有的水平。这里有一些例子说明了这一点:
到2020年,68%的业务应用工作量将出现在公共云中——《思科全球云指数:预测和方法(2015-2020)》;
80%以上的全球知识工作者从网络外连接——《PGI全球电信网络调查》;
物联网设备和运营技术(OT)正在大量连接到IT网络,这使得人们很难知道连接到网络的是什么;
为了更好地协作和同步,供应商、承包商和合作伙伴的生态系统获得了系统访问权限;并且
Gartner估计,在未来一年内,25%的企业数据流量将绕过边界安全防护,直接从移动设备流向云端
数字时代挑战。在数字时代,识别和保护静态网络边界几乎是不可能的。不出所料,根据2018年《Verizon数据泄露报告》,泄露数量仍然相当大。更糟糕的是,Verizon调查中有68%的入侵事件持续数月都没有被发现。关键是不管您有没有发现破坏分子,他们一直存在于网络中。
Leo Liu ADI公司
摘要

随着人工智能的发展,语音交互技术正在各个领域扎根,汽车也不例外。早在 2002年,英菲尼迪就推出了世界首款可用语音控制的汽车,而今天语音识别控制功能已经成为很多新车型的一大卖点。语音识别之外,外置麦克风的环境声探测在ADAS中也发挥关键作用,犹如汽车的耳朵,犬吠声、喇叭声、警报声......声音信号有助于让ADAS系统更加有效地掌握周边环境。
SAR(逐次逼近寄存器)ADC模拟输入模型、反冲和RC滤波器简介。
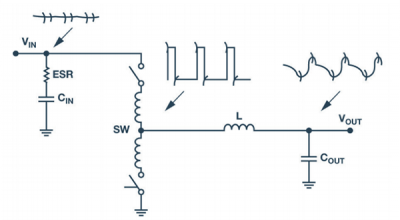
作者:Bruce Haug
背景知识
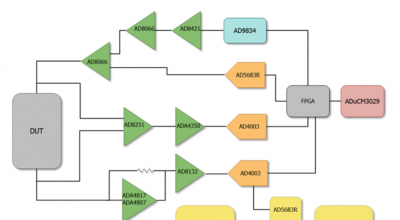
作者:Gustavo.Castro
需要测量阻抗(电路中电压和电流之间的关系)的应用需求持续增加,因此,ADI开发了多款阻抗测量IC,如AD5933和ADuCM350,这些产品获得了广泛的市场认可。然而,这些器件并不能满足所有应用的需求,设计人员仍然面临着使用标准组件设计这种测量能力的挑战。其中一些人面对这些选择和挑战可能会有点无所适从。
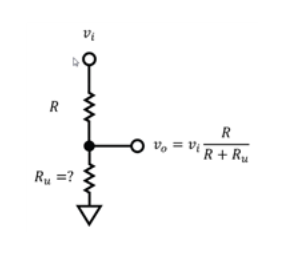
让我们从基础开始,看看现代IC可以做些什么。虽然大多数人都从电压电流比的角度来考虑阻抗,但从电路的角度来说,它可以归结为两个电压信号以及一个已知阻抗和一个未知阻抗之间的关系。例如,要通过未知电阻RU施加电流,我们可以将该电阻放置在具有已知电压vi和第二个已知电阻R的电路中,这会形成一个分压器,输出电压为vo,可针对RU求解:

1.1 产品概述
在研究隔离以及应用隔离器件时,我们应该先了解为什么需要隔离。需要隔离的主要原因是出于人员或者设备的安全考虑。在应用中,高压、电流浪涌和接地环路电流,会干扰通信,对设备造成损害,甚至导致人身伤害。采用隔离措施可阻止电流,允许信号通过,实现正常通讯,保护人员和设备。

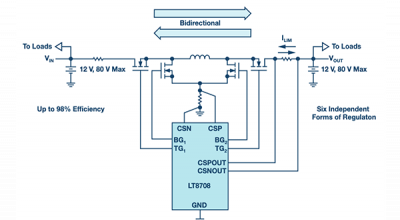
Victor Khasiev ADI公司
简介