陀螺仪机械性能:最重要的参数
selina -- 周四, 02/14/2019 - 15:48
作者:Harvey Weinberg,ADI公司MEMS和传感器技术 部应用工程组主管
作者:Harvey Weinberg,ADI公司MEMS和传感器技术 部应用工程组主管
Mark Looney 应用工程师 ADI公司
摘要

作者:Ben Wang

机器人要想完成特定任务,就一定要有所动作,这个时候,必须掌握如何控制机器人走直线、曲线,从而使机器人移动到我们想做任务的地方。
机器人走直线,难吗?
我们看到一些先进的机器人,走在路上非常稳,不仅在平地上行动不会摔跤,走在坑洼里也可以极好地保持平衡。
Mark Looney 应用工程师 ADI公司
摘要

选择陀螺仪时,需要考虑将最大误差源最小化。在大多数应用中,振动敏感度是最大的误差源。其它参数可以轻松地通过校准或求取多个传感器的平均值来改善。零偏稳定性是误差预算较小的分量之一。
作者:Harvey Weinberg
简介
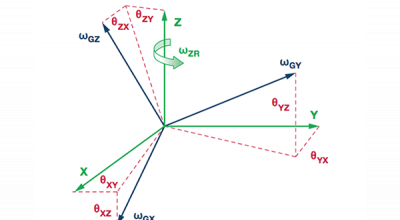
在相位和频率响应对系统正常工作至关重要的应用中,通常会使用惯性传感器。此应用笔记将讨论ADI公司的 iMEMS加速度计及陀螺仪(ADXLxxxx和ADXRSxxx系列器件)的相位及频度响应性能。

本视频是ADI公司MEMS陀螺仪和同类陀螺仪产品的对比演示,比较两者对错误输出激励的响应。可以看出,我们的结果新款陀螺仪具有高抗振动、抗冲击性和抗线性加速度特性。