无刷直流 (BLDC) 电机寿命长、采用直流电源且相对经济实惠,因此广泛应用于硬盘驱动器、冷却风扇和 DVD 播放机等电子设备的设计。通常情况下,BLDC 的速度和扭矩由 MCU 使用标量技术控制。
现在一类新型应用正悄然兴起,其中以四旋翼无人机最具代表性,这类应用正日益受到业余爱好者的青睐此外,无人机也正被监控等众多商业应用纳入考量。对这些应用而言,尤其重要的是控制器的动态响应,以及控制器在低速和无传感器的情况下平稳控制 BLDC 的能力。
对于负载动态变化的应用来说,标量技术不够精确。而磁场定向控制 (FOC) 技术能够大大提高精度,因而广泛用于驱动高端工业 AC 设备。通过实施 FOC,BLDC 能够以合理的成本为无人机和其他高性能应用(例如医疗机器人、万向系统和自主驾驶车辆)提供精确控制。
设计这类产品在过去并非易事。其中需要精通 FOC 或直接扭矩控制 (DTC) 等某些其他高级先进的电机控制技术,以及专用软件开发系统的操作知识。如果应用对成本敏感,例如可能在执法行动中使用的带监控摄像头的无人机,则设计经济实惠的 BLDC 电机也将面临挑战。
磁场定向控制 (FOC)
用于控制 BLDC 电机的传统标量技术被称为六步(梯形)控制。定子以六步过程驱动,会在产生的扭矩上振荡。每一对绕组会通电,直到转子到达下一位置,而此时电机将转换到下一步。对于无传感器的应用,在定子绕组中产生的反电动势通常用于确定转子的位置。
标量控制的动态响应无法处理动态负载快速变化的应用。因此,矢量控制正日益得到广泛应用,从交流电机驱动的白色家电(如洗衣机)到以电池供电的产品。
FOC 是矢量控制最常用的方法之一。其工作原理为:管理定子绕组以确保转子的永磁体所产生的磁通正交于定子的磁场。
FOC 最初是为控制三相交流电机而开发。考虑到用于小型无人机的 BLDC 电源是电压为 21 V (五节锂聚合物电池)的电池,电子元器件必须包含低压三相逆变器系统。其他主要的元器件还有电机驱动器、MCU 以及执行 FOC 算法的软件,其中软件可能是最重要的。
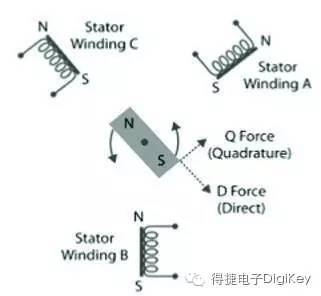
FOC 处理在直轴 - 交轴 (d-q) 域中完成,该域是一个旋转参照系。直轴和交轴分量是磁链状态矢量分解的两个分量,即产生磁通 (d) 和扭矩 (q) 的分量。此关系如图 1 所示。电机定子绕组内的电流处于受控状态,以确保转子的永磁体所产生的磁通正交(成 90°)于定子的磁场。除产生精确的电机控制之外,这种方式还能够提供极其精确的扭矩控制,这才是在 d-q 坐标系中操作的真正优势。
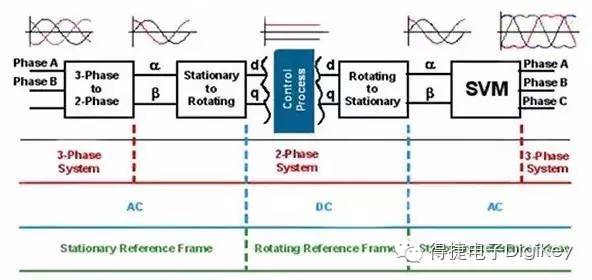
FOC 包含三个域变换:(1) 定子中的测量相电流从 3 相静止坐标系变换到 2 相静止坐标系 (α, β);(2) 该 2 相静止坐标系变换为与转子磁通对齐的旋转二项坐标系 (d-q);(3) 为了实际驱动电机,d-q 分量又变回到定子坐标系,用于空间矢量脉冲宽度调制 (SVPWM)。此过程如图 2 所示。
为了将 d-q 坐标系与转子对齐,转子位置的详细信息是必不可少的。从相对简单的反电动势过零检测,到复杂的滑模观察器和扩展 Kalman 滤波器,转子位置的估算技术各种各样。
驱动电机
从静止 3 相坐标系变换到 2 相 d-q 坐标系将产生之前所说的直轴和交轴分量。直轴 (d) 分量无有效扭矩,而事实上,它往往会增加电机的轴承磨损。因此,目标之一就是最大限度地减少此分量。交轴 (q) 分量可产生实际的电机扭矩,这由应用来决定。
d-q 分量应用于两个 PI (比例-积分)控制器,分别对应零和应用扭矩设置,以产生矢量输出。两个 PI 控制器的输出是是所需定子电压空间矢量的(新)直轴和交轴电压分量。如之前所述,最后一步是将 d-q 分量转换回到定子坐标系中,以实际驱动电机。
上述过程只是 FOC 工作方式的总结,而其实施所需的许多相当复杂的中间步骤,不在本文的范围内。有关与小型无人机直接相关的更详细的 FOC 讨论,您可参阅澳大利亚中央昆士兰大学的帕特里克·费雪所写的论文“High PerformanceMotor Control”(高性能电机控制)。1
所需的中间步骤包括:
* 确定电机的特性(除极数以及电压与电流的额定值,BLDC 电机很少会提供更多的铭牌信息)
* 转子位置的估算(实施 FOC 控制的关键信息)
* 设计合适的电源控制方案
* 设计扭矩和速度控制器
通常情况下,IC 供应商也会选择将开发工具使用的软件库存储在 ROM 中,并使其仅可在选定的 MCU 上使用,以此来保护其知识产权。
如之前所述,精确的电机控制依赖于精确电机模型的建立InstaSPIN-FOC 包括一个名为“观察器”的专有软件算法,可估算转子磁通量、角度、速度和扭矩 (FAST)。InstaSPIN-FOC 还具有电机参数识别能力,可在开发过程中离线提取必要的性能参数以及在工作过程中在线追踪参数。
电机参数信息用于调整电流控制带宽。
因此,设计人员在启动开发之后,在短短几分钟之内便可拥有已完全微调的无传感器观察算法,以及完全微调的稳定 FOC 扭矩控制系统。 在螺旋桨控制等应用中,设计人员还需要做的唯一任务就是测试与微调 PI 速度控制单回路,以实现所需的性能和操作。
基本驱动系统的简化版本如图 3 所示。转速 PI 控制器的输出将作为 PI 电流控制器的输入基准信号进行连接。如果转速太低,电机将增大电流以产生更大的扭矩,从而加快转速。反过来,如果电机运转过快,电机将减少扭矩以减慢转速。这两个 PI 控制器共同形成了级联式控制回路,这就表示控制系统是由具有一个或多个内部回路的外部回路所组成。
结论
一类新型的电机控制应用正在兴起,此应用需要对小型 BLDC 电机具备出色的动态响应。这些应用包括医疗机器人、万向系统、自主驾驶车辆和小型无人机。虽然 FOC 电机控制技术在过去几十年中广泛用于 AC 工业电机和白色家电电机,但由于此技术非常复杂,且需要高性能的 MCU,因此迄今为止尚未应用于由电池组供电的小型电机。然而过去几年出现了让这种可能成为现实的新产品。