精度?分辨率?弧分?如何管理您的电机控制设计
selina -- 周一, 05/15/2017 - 08:26
想象一下您今早开车上班的路上:交通灯变绿,您立刻踩下油门,车在几秒钟内快速响应,继续驶向公司。这个过程看似简单,但实际上,车内却发生了一系列的复杂操作。让我们一起来看看吧。
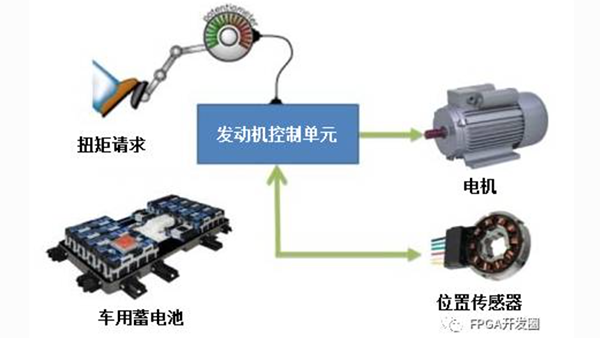
当您踩下踏板时,电机将通过转轴向车子提供必要的扭矩,随后牵引电机驱动车辆前进。牵引电机(通常为三相同步电机)由复杂的电路控制,包括多个晶体管、电机驱动器,以及保护和反馈控制。反馈控制信号由电机位置传感器(见图1)以模拟角度输出信号的形式发出(注意,所有现实世界的信号都是模拟的)。借助于模拟-数字转换器(ADC),连续的模拟信号被转换成数字域。理想的情况下,您可以将连续的模拟信号分解成无限数量的数位步进,但在现实世界中,ADC的模拟信号量化是有限的数量步进,而由此导致的误差称为量化误差。这里便涉及到“精度”和“分辨率”这两个术语。