作为应用工程师,我们经常遇到各种有关差分输入型高速模数转换器(ADC)的驱动问题。事实上,选择正确的ADC驱动器和配置极具挑 战性。为了使鲁棒性ADC电路设计多少容易些,我们汇编了一套通用"路障"及解决方案。本文假设实际驱动ADC的电路—也被称为ADC 驱动器或差分放大器 — 能够处理高速信号。
引言
大多数现代高性能ADC使用差分输入抑制共模噪声和干扰。由于采用了平衡的信号处理方式,这种方法能将动态范围提高2倍,进而改善系统总体性能。虽然差分 输入型 ADC也能接受单端输入信号,但只有在输入差分信号时才能获得最佳ADC性能。ADC驱动器专门设计用于提供这种差分信号的电路—可以完成许多重要的功能,包括 幅度调整、单端到差分转换、缓冲、共模偏置调整和滤波等。自从推出 AD8138,1 以后,差分ADC驱动器已经成为数据采集系统中不可或缺的信号调理元件。

图1是一种基本的完全差分电压反馈型ADC驱动器。这个图与传统运放的反馈电路有两点区别:差分ADC驱动器有一个额外的输出端(VON)和一个额外的输入端(VOCM) 。当驱动器 与差 分 输入型ADC连接时,这些输入输出端可以提供很大的灵活性。
与单 端 输出相反,差 分ADC驱动器产生平衡的差分输出信号—相对于VOCM—在VOP与VON 之间。这里的P指的是正,N指的是负。VOCM输入信号控制输出共模电压。只要输入与输出信号处于规定范围内,输 出共模电压必定等于VOCM输入端的电压。负反馈和高开环增益致使放大器输入端的电压VA+和VA- 实质上相等。
为了便于后面的讨论,需要明确一些定义。如果输入信号是平衡信号,那么VIP和VIN 相对于某个公共参考电压的幅度应该是相等的,相位则相反。当输入信号是单端信号时,一个输入端是固定电压,另一 个输入端的电压相对这个输入端变化。无论是哪种情况,输入信号都被定义为 VIP – VIN。
差模输入电压VIN, dm和共模输入电压VIN, cm的定义见公式1和公式2。
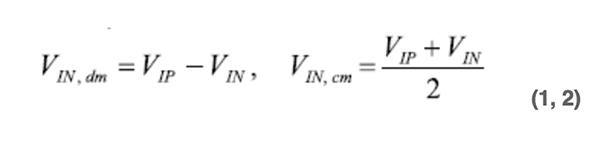
虽然这个共模电压的定义应用于平衡输入时很直观,但对单端输入同样有效。
输出也有差模和共模两种,其定义见公式3和公式4。
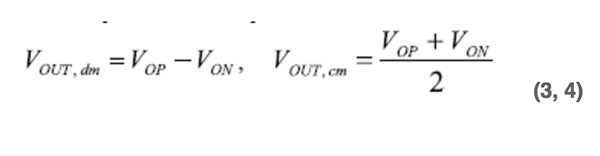
需要注意实际的输出共模电压VOUT, cm和VOCM输入端之间的差异,这个差异决定了输出共模电平。
对差分ADC驱动器的分析比对传统运放的分析要复杂得多。为了简化代数表达式,暂且定义两个反馈系数β1和β2,见公式5和公式6。
在大多数ADC驱动应用中 β1 = β2, 但含有 VIP, VIN, VOCM, 1和2项的 VOUT, dm通用闭环公式对于了解β失配对性能的影响非常有用。VOUT, dm 的计算见公式7,其中包括了与频率相关的放大器有限开环电压增益A(s)。
当 β1 ≠ β2, 差分输出电压取决于VOCM—这不是理想的结果,因为 它产生了偏移,并且在差分输出中有过大的噪声。电压反馈架构的增益带宽积是常数。有趣的是,增益带宽积中的增益是两个反馈系数平均值的倒数。
当 β1 = β2 ≡ | β, 公式7可以被简化为公式8。
这个表达式大家可能更加熟悉。 当 A(s) → ∞. 理想的闭环增益可以简化为RF/RG 增益带宽乘积公式看起来也很熟悉,其中的"噪声增 益 "与传统运放一样,等于1/β。
反馈系数匹配的差分ADC驱动器的理想闭环增益见公式9。
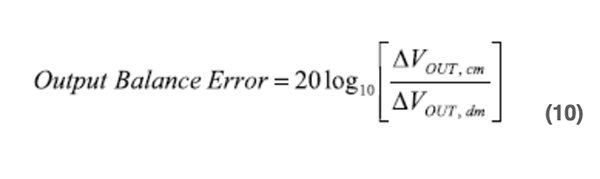
输出平衡是差分ADC驱动器的一个重要性能指标,它分两个方面:幅度平衡和相位平衡。幅度平衡用于衡量两个输出在幅度方面的接近 程度,对于理想放大器来说它们是完全一致的。输出相位平衡用于衡量两个输出的相位差与180°的接近程度。输出幅度或相位的任何 失衡都会在输出信号中产生有害的共模分量。输出平衡误差(公式10)是差分输入信号产生的输出共模电压与相同输入信号产生的输 出差模电压的对数比值,单位是dB。
内部共模反馈环路迫使VO U T, cm等于输入端VOCM的电压,从而达到完美的输出平衡。
将输入端接到ADC驱动器
处理高速信号的系统经常会用到ADC驱动器。分隔距离超 过信号波长一小段的器件之间必须用具有受控阻抗的电气传输线连接,以避免 破坏信号完整性。当传输线的两端用其特征阻抗端接时可以取得最佳性能。驱动器一般放在靠近ADC的地方,因此在它们之间不要求使 用受控阻抗连接。但到ADC驱动器输入端的引入信号连接通常很长,必须采用正确电阻端接的受控阻抗连接。
不管是差分还是单端,ADC驱动器的输入阻抗必须大于或等于理想的终端电阻值,以便添加的终端电阻RT能与放大器输入端并联达到 要求的电阻值。本文讨论的例子中的所有ADC驱动器都设计成具有平衡的反馈比,如图2所示。
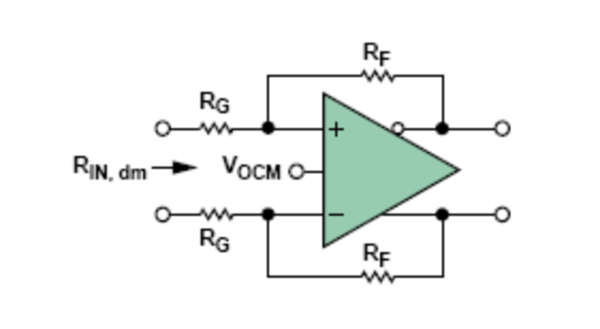
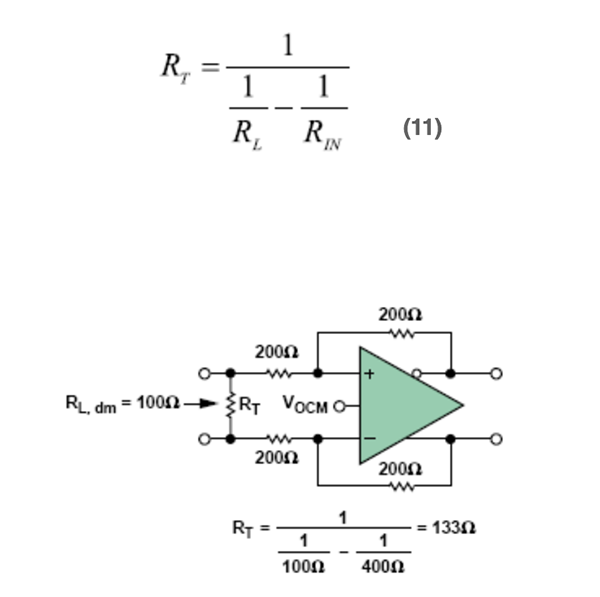
因为两个放大器输入端之间的电压被负反馈驱动到零,因此两个输入端处于连接状态,差分输入阻抗RIN就简单地等于2×RG。为了匹配传输线阻抗 RL,需要将由公式11计算得到的电阻RT跨接在差分输入端。图3给出了典型的电阻值,其中 RF = RG = 200 Ω, 理想的 RL, dm = 100 Ω, and RT = 133 Ω.
单端输入的端接更加麻烦。图4描述了采用单端输入和差分输出的ADC驱动器工作原理。
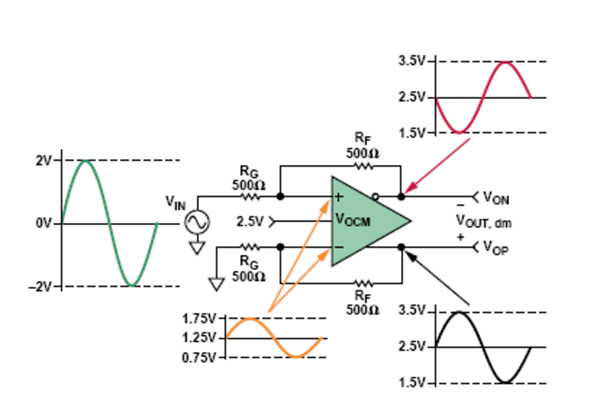
虽然输入是单端的,但 VIN, dm 等于 VIN. 因为电阻RF和RG 是相等和平衡的,因此增益是1,而且差分输出 VOP – VON, 等于输入,即 4 V p-p. VOUT, cm = VOCM = 2.5 V ,而且从下方的反馈电路可以看出,输入电压 VA+ 和 VA– 等于 VOP/2.
根据公式3和公式4, VOP = VOCM + VIN/2, 即2.5V±1V的同相摆幅; VON = VOCM – VIN/2, 即2.5V±1V的反相摆幅。这样,VA+ 和 VA– 的摆幅等于 1.25V±0.5V。 The 必须由 VIN 提供的电流交流分量等于 (2 V – 0.5 V)/500 Ω = 3 mA, 因此到地的电阻必须匹配,从 VIN, 看过去为 667 Ω.
当每个环路的反馈系数都匹配时,公式12 就是计算这个单端输入电阻的通式,其中RIN, se是单端输入电阻。

这是计算终结电阻的出发点。然而值得注意的是,放大器增益公式基于零阻抗输入源的假设。由于存在单端输入造成的不平衡而必须 加以匹配的重要源阻抗只会增加上面RG的阻值。为了保持平衡,必须增加下面RG的阻值来实现匹配,但这会影响增益值。
虽然可以为解决端接单端信号问题而采用一个封闭形式的解决方案,但一般使用迭代的方法。在下面的例子中这种需求将变得很明显。
在图5中,为了保持低的噪声,要求单端到差分增益为1,输入终结电阻为50Ω,反馈和增益电阻值在200Ω 左右。
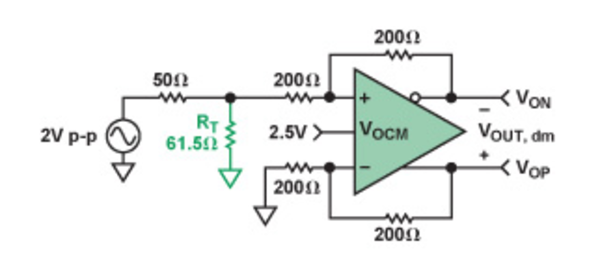
根据公式12可以算出单端输入电阻为267Ω。公式13表明,并联电阻RT应等于61.5Ω,才能将267Ω输入电阻减小至50 Ω.
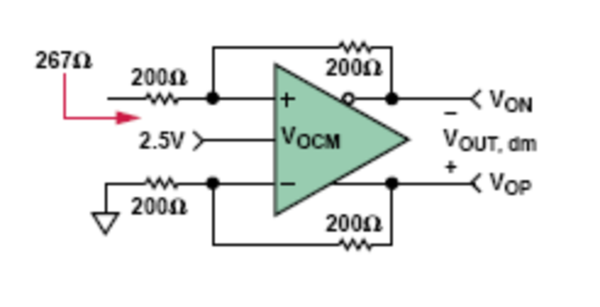
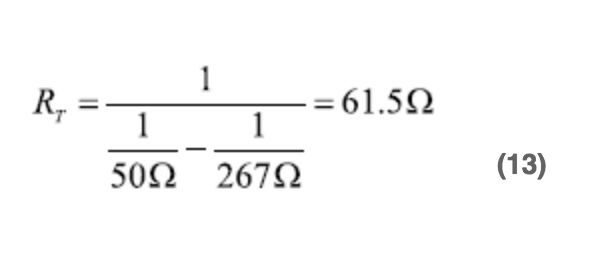
图6是带源电阻和终端电阻的电路。带50Ω源电阻的源开路电压为2Vp-p。当源用50Ω端接时,输入电压减小到1V p-p,这个电压也是单位增益驱动器的差分输出电压。
这个电路初看起来非常完整,但不匹配的61.5Ω电阻与50Ω的并联并增加到了上面的RG电阻,这就改变了增益和单端输入电阻,并且造成 反馈系数失配。在低增益情况下,输入电阻的变化很小,暂时可以忽略,但反馈系数仍然必须匹配。解决这个问题的最简单方法是增加下面 RG的阻值。图7是一种Thévenin等效电路,其中上方的并联组合用作源电阻
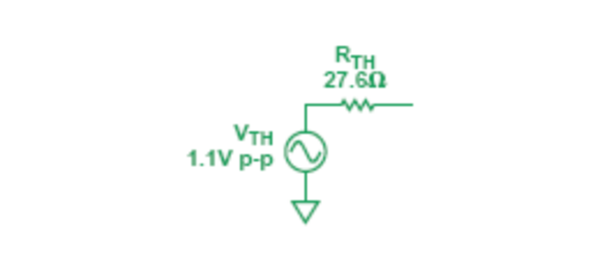
有了这种替代方案后,就可以将2 7. 6Ω的电阻RTS 增加到下面的环路中实现环路反馈系数的匹配,如图8所示。
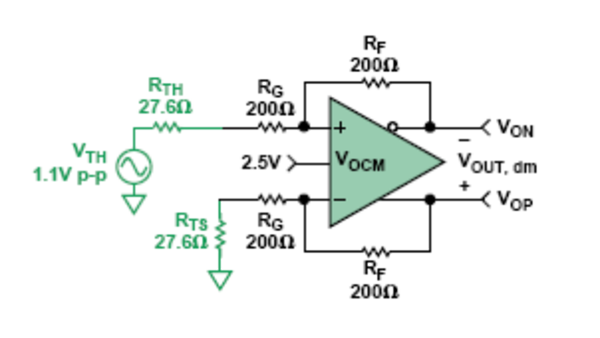
注意,1.1V p -p的Thévenin电压要大于1V p-p的正确端接电压,而每个增益电阻增加了2 7. 6Ω,降低了闭环增益。对于大电阻(>1kΩ) 和低 增 益(1或2)来说这些相反的效应基本抵消,但对于小电阻或较高增益来说并不能完全抵消。
图8所示电路现在分析起来就很容易了,其中的差分输出电压可以用公式14计算。
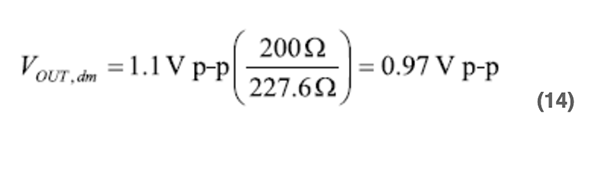
差分输出电压并不完全等于理想的1Vp-p,但可以通过修改反馈电阻实现最终独立的增益调整,如公式15所示.
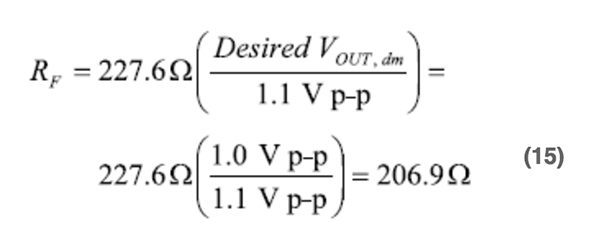
图9是用标准1%精度电阻实现的完整电路。
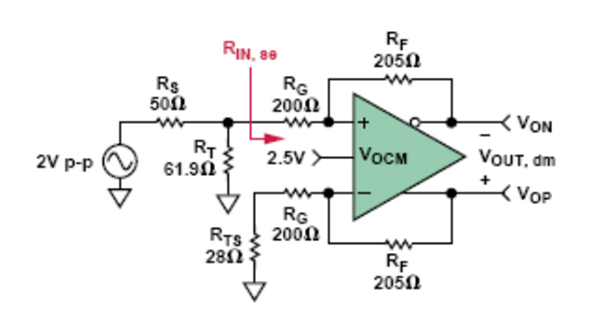
观察: 参考图9,驱动器的单端输入电阻RI N, s e由于RF和RG的改变而变化。驱动器上端环路的增益电阻是200Ω ,下端环路的电阻是 200 Ω + 28 Ω = 228 Ω 。在不同增益电阻值的情况下计算RI N, s e首先要求计算两个β值,见公式16和公式17。
输入电阻 RIN, se的计算见公式18。
这个值与原来计算的267Ω稍有不同,但对RT的计算没有显著的影响,因为R IN, se与RT 是并联的关系。
如果需要更精确的总体增益,可以使用更高精度或串联的可调电阻。
述的单次迭代方法非常适合闭环增益为1或2的场合。增益越高,RTS的值越接近RG值,用公式18计算的RIN, se 值与用公式12计算的RIN, se值之间的差异就越大。在这些情况下要求采用多次迭代。
多次迭代并不难实现:最近ADI公司发布的可下载的差分放大器计算工具, ADIsimDiffAmp™ (参考文献2)和 ADI Diff Amp Calculator™(参 考文献3)足以担当此任,它们能在几秒内完成上述计算。
输入共模电压范围
输入共模电压范围(ICMVR)规定了正常工作状态下可以施加于差分放大器输入端的电压范围。在这些输入端上呈现的电压可以被称为ICMV、 Vacm或VA±。这个ICMVR指标经常被误解。最常遇到的难题是确 定差分放大器输入端的实际电压,特别是相对于输入电压而言。知道变量VIN, cm、 β和VOCM的值后,当β不相等时使用通式19、当β相等时使用简化公式20就可以计算出放大器的输入电压(VA±)。

记住VA始终是按比例缩小的输入信号,这一点非常有用(见图4)。不同的放大器类型有不同的输入共模电压范围。 ADI公司的高速差分ADC驱动器有两种输入级配置,即中心型和偏移型。中心型ADC驱动器的输入电压离每个电压轨有约1V的距离(因此叫中心型)。而偏移 型输入级增加了两个晶体管,允许输入端电压摆幅更接近–VS轨。图10是一个典型差分放大器(Q2和Q3)的简化输入原理图。

偏移型输入架构允许差分放大器处理双极性输入信号,即使放大器是采用单电源供电,因此这种架构非常适合输入是地或地电平以下的单电源应用。在输入端增加的 PNP晶体管(Q1和Q4)可以将差分对的输入电压向上偏移一个晶体管的Vbe电压 。例如,当-IN端电压为-0.3V时,A点电压将为0.7V,允许差分对正常工作。没有 PNP(中心型输入级)时,A点的-0.3V电压将使NPN差分对处于反向偏置状态,因而无法正常工作。
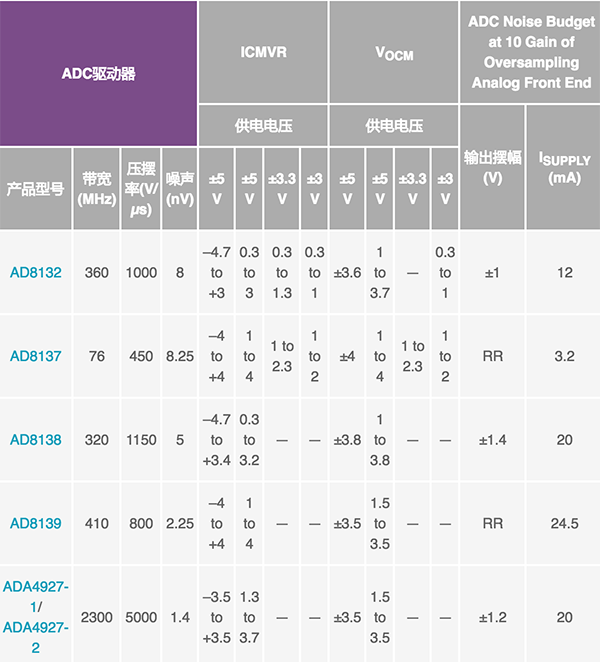
表1提供了ADI公司ADC驱动器的多数指标一览表。对这张表粗略一看就能发现哪些驱动器具有偏移型ICMVR,哪些没有。
表1:高速ADC驱动器的指标。

未完待续!